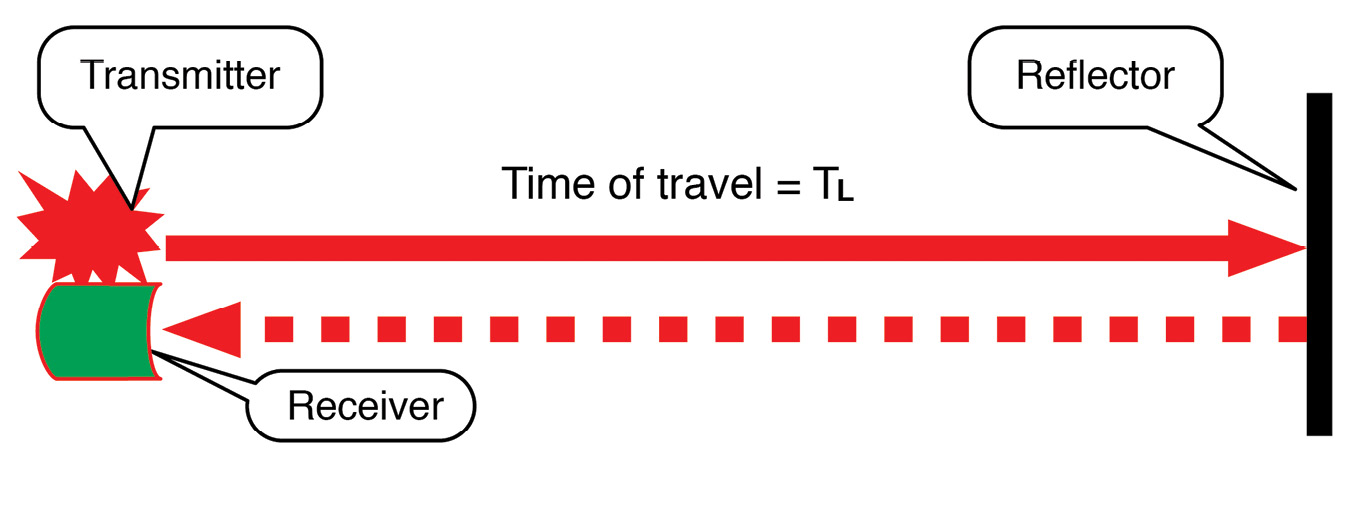
Figure 1: Principle of time-of-flight lidar
As autonomous vehicles approach widespread deployment, lidar technology continues to be one of the crucial enabling technologies. Lidar is often described as the “eyes” of autonomous vehicles, providing the critical 3D view of the environment. While initial AV deployments used time-of-flight (ToF) lidar, a more sensitive and powerful type of lidar is emerging to address unmet industry needs. Frequency-Modulated, Continuous-Wave (FMCW) lidar is 10-100 times more sensitive than traditional time-of-flight sensors and, critically, offers additional benefits including Doppler velocity information and immunity to sunlight and other lidar signals. For these reasons, many believe that FMCW lidar will emerge as the sensor of choice for Level 4 and Level 5 autonomous vehicles.
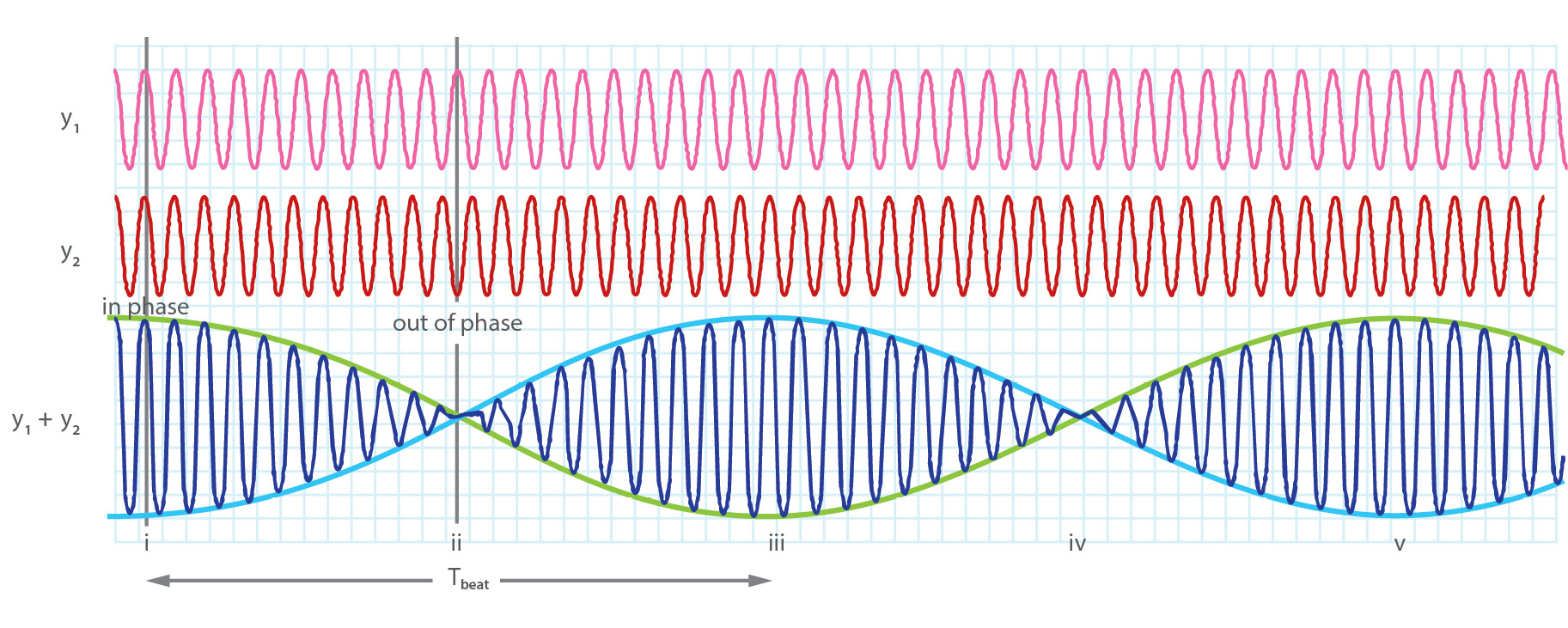
Figure 2: Principle of frequency-modulated continuous-wave (FMCW) lidar
ToF lidar sends out a narrow laser pulse and measures the time it takes for that pulse to bounce off a target and return to the sensor (Figure 1). FMCW lidar, similar to radar, sends a burst or ‘chirp’ of laser wavelengths to the target, while retaining a copy of that wavelength chirp. Only an exact match of the wavelength ‘chirp’ will combine with the on-board copy and, once the reflected signal is combined with the on-board copy, the signal intensity is amplified, enabling more sensitive detection (Figure 2).
ToF lidar sensor technology has some significant limitations

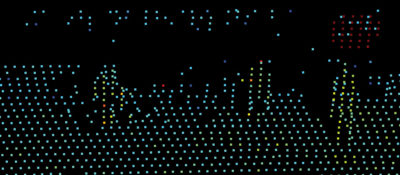
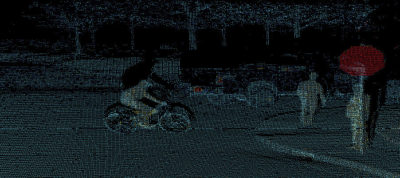
Figure 3: Image of truck, cyclist and pedestrians (top) together with lidar views of the scene: simulated ToF point cloud (middle), FMCW point cloud (bottom).
ToF technology was likely initially selected as it uses simple and widely available lasers and photonic components. While the ToF lidar currently being used in autonomous vehicles (AVs) and advanced driver assistance systems (ADAS) performs some tasks well, it also has significant limitations that must be overcome before AVs can operate safely under all conditions. These limitations include:
- System latency. AVs must ingest the data from various sensors and make driving decisions. The time between sensing and acting is referred to as latency. In addition to range, object velocity is a critical factor in AV decision making. For example, in making an unprotected left-hand turn, the AV needs to not only know how close an approaching vehicle is, but also how fast it is approaching. ToF lidars determine this velocity by taking object ranges of multiple frames and calculating the velocity. It can take multiple frames in order to obtain a velocity, delaying the AV decision and resulting in jerky motion or abrupt stops.
- Environmental performance. Performance specifications for ToF systems are affected by strong sunlight and can be compromised by other lidar systems operating in the area, limiting the useful operating range of the systems.


FMCW naturally addresses the limitations of ToF sensors
Figure 4: “Chip-scale” view of FMCW lidar
The FMCW detection technique overcomes a number of the inherent limitations of ToF. For this reason, most radar systems moved from ToF detection to FMCW many years ago.
Key advantages to FMCW detection include:
- Higher sensitivity. The FMCW technique utilizing coherent gain from the on-board amplification enables higher sensitivity, thus longer range. Insight lidar’s FMCW sensor uses lasers in the short-wave infrared (SWIR) band in order to produce enough eye-safe power to meet the automotive range targets.
- Velocity with every pixel. FMCW lidar provides a direct Doppler velocity reading with every pixel. No frame-to-frame analysis or other calculations are required. Objects can be identified and classified up to five times faster, compared to ToF, using direct Doppler data.
- Immunity to sunlight and other lidar systems. FMCW detection processes only signals with the exact transmitted chirp. This means that there is no performance degradation, even staring right into the sun. Further, performance will not be affected by other lidar systems, including other FMCW lidar systems operating in close proximity. This rejection of unwanted
light is accomplished by design.
No extra processing or computational overhead is required.
Overcoming FMCW technology challenges

Digital Coherent LiDAR Sensor from Insight LiDAR, shown alongside familiar objects to indicate size.
FMCW lidar technology has great promise for the reasons outlined above. However, there remain challenges in implementation. For example, FMCW lidar requires a more complex, very well controlled laser source. The laser must be able to tune or ‘chirp’ very quickly and repeatably and must maintain its beam quality both during the chirp and over time. The speed of both the chirp and the chirp cycle time directly relate to pixel rate or resolution.
FMCW lidar systems typically scan the beam over the field of view to create the image. The type of scanner used is another critical component of the FMCW lidar system design. The ideal design would cover a wide field of view, while retaining flexibility to put more pixels in the areas of interest in a frame. For highest reliability and lowest cost, the fast-axis should be scannable via software utilizing no moving parts.
Insight LiDAR’s FMCW sensor1 utilizes a custom laser source and control algorithms enabling extremely fast chirps. Insight also utilizes software-controlled tuning, with no moving parts for the critical fast-axis. The result is a long-range, FMCW lidar system with resolution 8-64 times better than ToF.
Better reliability, lower cost
Due to their components and system architecture, FMCW lidar systems are much easier to integrate into semiconductor packages than their ToF counterparts. By putting all the photonic components on to photonic integrated circuits (PICs) and all the electronics on to ASICs, the systems can be made very small. And because the PICs and ASICs can be assembled and tested at wafer-scale volume costs can be very low, well within the goals of the autonomous vehicle manufacturers.
For autonomous vehicles to become more than curiosities, they must operate safely in all types of conditions. This requires long-range, ultra-high resolution lidar systems with significantly higher performance than today’s systems at much lower costs.
FMCW lidar, with its significant performance advantages, coupled with its ability to take full advantage of semiconductor cost curves, is expected by many to play a huge role in this deployment.