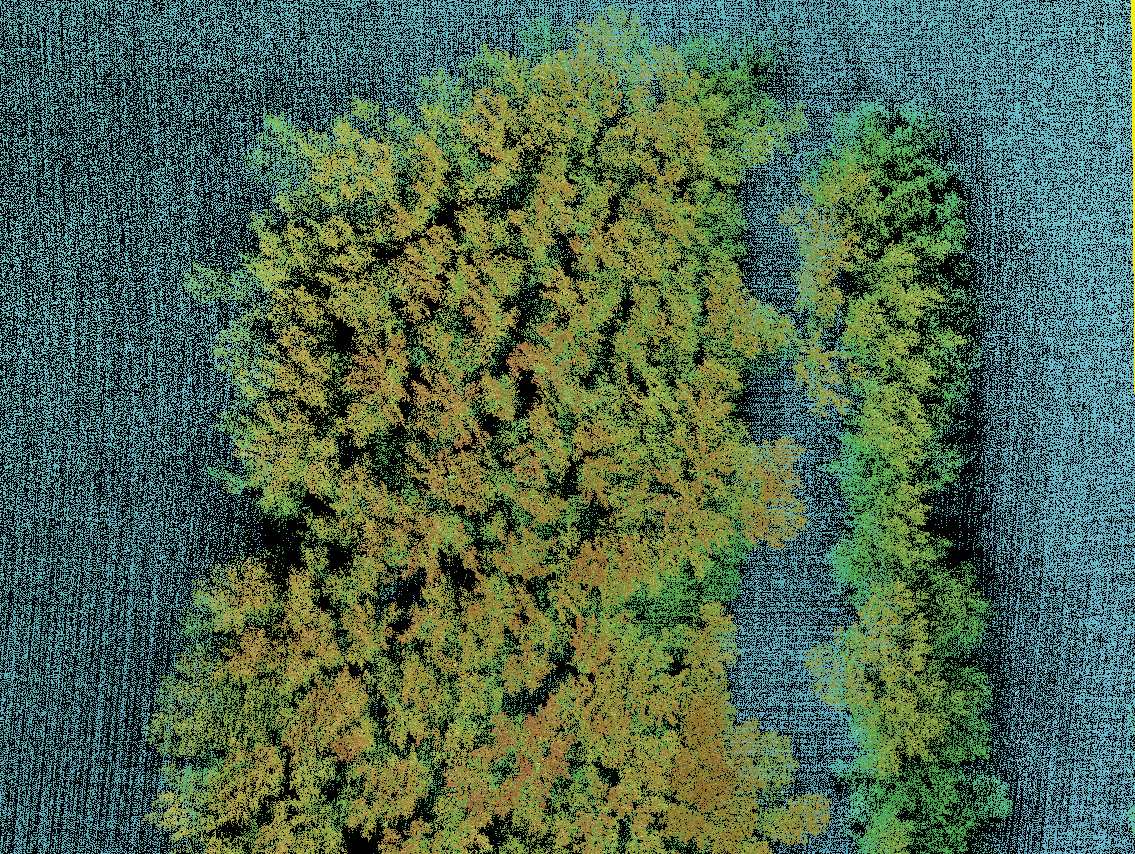
Figure 1: The QC Site (colorized by elevation)
I was recently involved in a detailed discussion of various metrics of processed airborne laser scanning (ALS) data that can be used as pass/fail criteria for the quality of the data. At the time of the assessment, the data are cleaned of noise, classified to ground, vertical accuracy assessed and tiled.
While the primary discussion revolved around point density, it expanded into other factors related to generating valid derived products, most especially digital elevation models (DEM) of the bare earth. One area of discussion was the practice of using the density of the overall first return LIDAR data (excluding withheld points) as a proxy for the bare earth point density.
My argument is that we really must focus on the product that is to be derived from the point cloud data. For example, imagine trying to use point density of first return data of a photogrammetrically derived point cloud as a test for adequate density for generating a ground DEM over a forested region. We might have no ground points whatsoever yet our test (since we are considering first return points, regardless of surface) would say we had super high density!
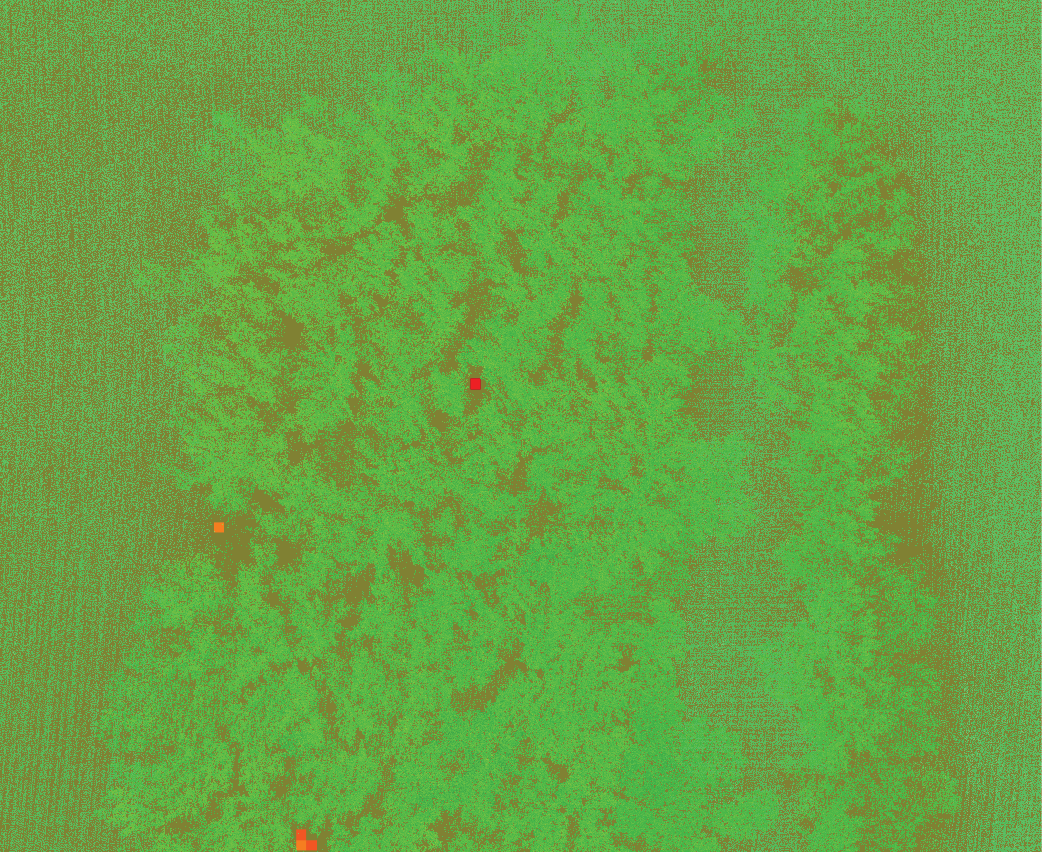
Figure 2: “All Points” Density Test
OK, maybe that is a stretch since (nearly) everyone now knows we cannot use photogrammetrically-derived point clouds in vegetated areas. So instead, let’s look at LIDAR data. In Figure 1 is shown a QC check area of LIDAR data collected by a Velodyne VLP-16 sensor flown at an above ground level (AGL) of 75 m. The point cloud is colored by elevation and modulated by intensity using GeoCue’s LP360/True View Evo software. You can clearly see we have an area of moderate vegetation (trees) surrounded by an open field. The definition of the vegetation looks great and we seem to have very nice coverage.
LP360/True View Evo contains a QC tool for measuring point cloud density. You specify a grid cell size and a density ramp and the software generates a colorized GeoTIFF image. For example, if I specify a cell size of 1 m and a point density of 2 points/m2, the software will create an image with green pixels where the density equals or exceeds 2 points/m2 but yellow, orange and finally red pixels as the density vanishes to zero. Figure 2 shows an image using all first return points, regardless of the type of surface from which they are reflected (ground or vegetation). I’ve set transparency on the GeoTIFF layer to 50% so you can see the underlying point cloud data. It looks as if we have excellent density to support a 1 m gridded product since there are only five cells indicating insufficient density.
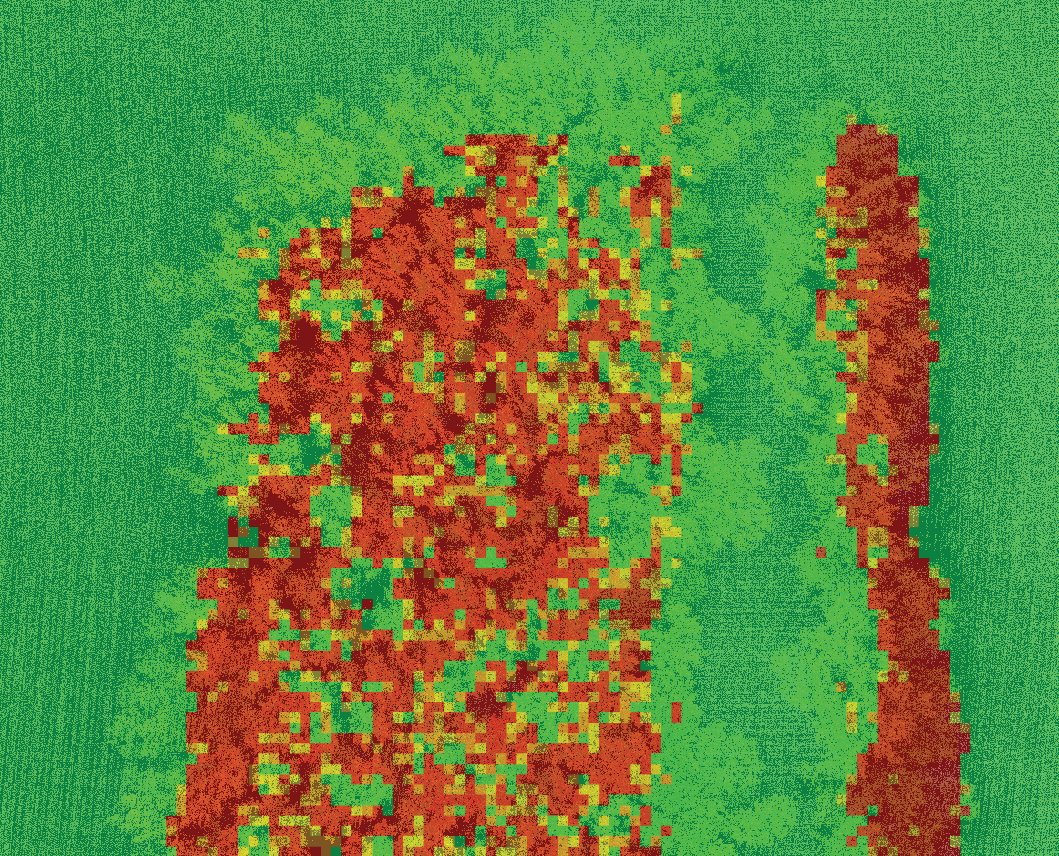
Figure 3: Ground Class Density Test
However, the product we desire to make is a 1-meter gridded elevation model of the ground. Thus I should be doing the analysis against points that actually are on the ground! Figure 3 shows the density test run on the point cloud data using only points classified as ground. As you can see, major areas of this data set would not support creating a high resolution (1 meter post spacing, in this example) DEM.
So the point (pun intended) here is that we should always analyze point cloud data in the context of the downstream products that we need. For a ground DEM, we should be examining the characteristics of the points that will be used to generate the ground. As seen in this example, the fact that I have a nice dense point cloud with full coverage of single return data says nothing about the density of points that actually make it to the ground.
You might question the fact that a low power drone LIDAR system was used in this example. However, you will observe poor ground penetration in any LIDAR system when using pulses far from nadir (large scan angle), when vegetation are wet and numerous other scenarios.
Till next issue, remember to look below the skin to access the true beauty of a point cloud!