Total Propagated Uncertainty must take into account the relationships between the datums defined by the ground control points and the inertial navigation system, as well as the characteristics of the lidar sensor and the circumstances of its use. Adopting the default TPU given by the sensor manufacturer is insufficient.
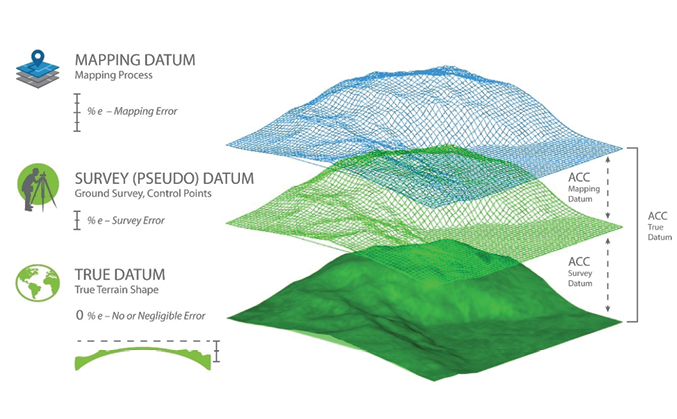
Figure 1: Datums and error propagation in geospatial data (Abdullah, ibid., 40). Reproduced by permission of the author.
We ended the previous Full Coverage column with parting recommendations on incorporating some form of Total Propagated Uncertainty (TPU) into the LAS format, focusing on airborne lidar data. We noted that for TPU to be truly useful we must safeguard the integrity of the information with independently verifiable methods, which could attract additional costs. This time, we would like to pick up that thread and elaborate on how to accomplish a meaningful TPU.
Measuring mapping surfaces
In the spring 2024 issue of LIDAR Magazine, our colleague, Qassim Abdullah, eloquently addresses the issue of true, survey (pseudo) and mapping datums1. Figure 1 illustrates how these three datums are related. There is the true surface (i.e. the earth), a survey/control point pseudo-surface, and the surface mapped by the lidar sensor.
For most topographic lidar surveys, we take the survey surface as “ground truth” and adjust the mapping surface accordingly, even though there is propagated error in the survey surface that may not be properly integrated into the final solution, as per Qassim’s commentary.
This whole process of adjusting the mapping surface to the survey (pseudo) surface works acceptably well provided that the survey surface is more accurate (see Qassim’s commentary on accuracy) than the mapping surface and is properly processed. But what happens when we cannot measure a survey surface, as in the case of acoustic bathymetry or topobathymetric lidar? Moreover, we cannot possibly measure the survey surface at every location where we have a lidar data point. That’s where TPU can provide an additional metric to determine how close the mapping datum is to the true surface.
TPU without the survey (pseudo) datum
The recent history of TPU for bathymetric lidar and, now, by extension, topographic lidar, begins in 2013 with an 11-parameter TPU model presented at the Joint Airborne Lidar Bathymetry Technical Center of Expertise (JALBTCX) workshop in 2013. This has undergone several revisions, resulting in the current 17-parameter TPU model. It is beyond the scope of this column to describe these models—suffice it to say that they attempt to describe the horizontal and vertical errors that can be attributed to systematic errors in the mapping sensor system, i.e., the mapping datum in Figure 1. Hence combining these errors provides a statistical estimate of the lidar positional uncertainty for each pulse. For additional information related to topobathymetric lidar, Minsu Kim (USGS) provides an excellent discussion of TPU and absolute accuracy2.
For airborne topographic lidar, Miloud Mezian and his colleagues divide the uncertainties into three categories3:
- navigational uncertainties: the uncertainty of the absolute position and the platform orientation measured by the inertial navigation system (INS) in real time: factors that can affect the accuracy of the INS include, but are not limited to, errors in measuring pitch, roll, and heading by the inertial measurement unit (IMU), multipath distortion and poor Global Navigation Satellite System (GNSS) geometry
- calibration uncertainties, including uncertainties in the lever arm and in the boresight angles between the laser scanner and the INS frame
- laser scanning (and ranging) uncertainties: influences on the laser-target position accuracy, such as weather, surface reflectance, incidence angle on the surface, and the scanner mechanism.
Thus the crux is how to measure and/or verify the three sets (Table 1) of input parameters to construct the covariance matrix for the TPU statistics.
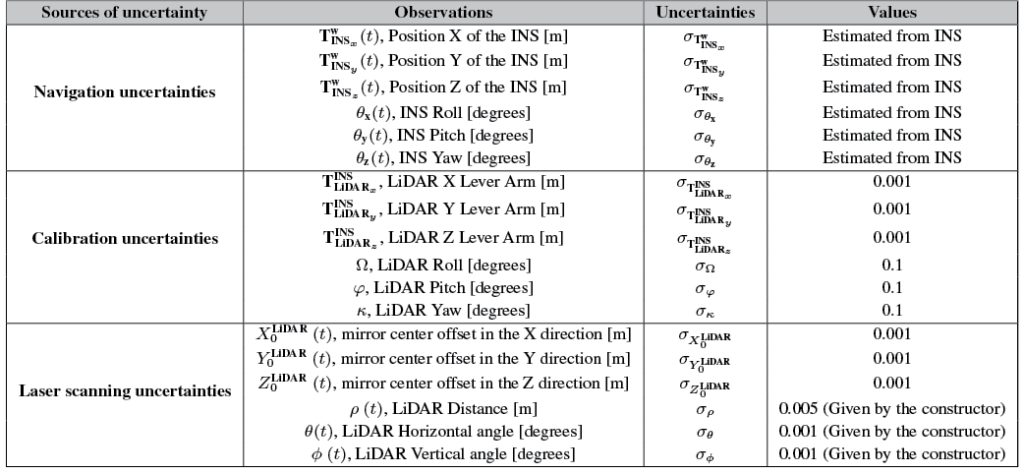
Table 1: 18-parameter total propagated uncertainty for terrestrial lidar systems (Mezian et al., 2016, 334). Reproduced by permission of the authors.
Issues surrounding TPU verification
In general, we suggest that the obligation to estimate initial TPU parameters falls primarily on the instrument manufacturers, while verification and testing of the reported TPU value(s) falls on the instrument-user community. Currently, some instrument manufacturers provide estimates for some, if not all, of the instrument (INS, laser, etc.) TPU values. While this is a good start, the user community should be reluctant simply to accept the defaults. In the absence of independent verification, instrument manufacturers could engage in “one-upmanship” and continually tweak the parameter values to make their instruments appear to provide “better” TPUs. The “trust but verify” approach still encourages instrument improvement and innovation while assuring the end-users that the data reports are reliable.
An immediate challenge to arise from the “leave it to the instrument user” approach to verification is the verification methodology itself. Because TPU represents a complex interaction among multiple components and is a statistical estimate, verification precludes a simple test/calibration course or making a physical measurement of one or more components. Minsu Kim suggests that one potential verification method may be to use simulated lidar waveforms to compute TPU4. While a lidar waveform simulator could be standardized, even this approach has limitations as each different terrain surveyed would require customized simulation parameters. Additional research may be needed to arrive at a more universal solution.
Perhaps the final challenge to verifying TPU is the additional cost that will be incurred. Lidar service providers generally work on a fairly tight budget for acquisition and data processing, so any additional data processing will add to the cost of a lidar survey. While the additional cost may be only a small percentage of the survey cost, it may be perceived as superfluous, since there is no huge outcry among lidar end-users for TPU in the first place.
Parting thoughts and recommendations
While simply adding the instrument manufacturer’s TPU to the LAS attribute specification is straightforward, making the value meaningful and reliable may be more challenging. To verify the TPU parameters, and hence the TPU value, an independent verification method is required. Simulated waveforms, repeated measurements on the instruments, or some other verification method must be accepted and standardized across the industry. Government and academia should continue to invest in research to derive consistent and standardized TPU and engage sensor manufacturers and data providers from the private sector. End-users may initially resist the additional cost, until the value of TPU is realized in the general community.
We welcome your comments on this topic, and remember, you can also participate and leave comments with the ASPRS Lidar Working Group. 
- 1 Abdullah, Q., 2024. Best practices in evaluating geospatial mapping accuracy according to the new ASPRS accuracy standards, LIDAR Magazine, 14(2): 37-46, spring 2024.
- 2 my.asprs.org/ASPRSMember/ASPRSMember/Events/Event_Display.aspx?EventKey=GW2020PM5
- 3 Mezian, M., B. Vallet, B. Soheilian and N. Paparoditis, 2016. Uncertainty propagation for terrestrial mobile laser scanner, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLI(B3): 331-335.
- 4 Kim, M. 2019. Airborne waveform lidar simulator using the radiative transfer of a laser pulse. Applied Sciences, 9(12): 2452, June 2019, 16 pp.