Geiger-mode (GM) lidar has been operationally proven by the US military since 20101 and is seeing renewed interest in the commercial geospatial world. 3DEO, a spin-out from MIT Lincoln Laboratory, is providing advanced GM lidar systems to the commercial market. This includes sensor hardware and a suite of processing software that enables lidar operators to execute complete projects. GM lidar sensors are powerful tools for fast and efficient collection of highly detailed 3D point clouds for applications such as forestry, wildfire modeling, urban mapping, wide-area mapping, and disaster response.
The next-generation systems from 3DEO include the core GM lidar technology advantages of fast measurement rates and exquisite sensitivity. They also embody significant advances over previous generations. A primary innovation is 3DEO’s patent-pending agile geo-referenced scanning2, which directs the full capability of the lidar into only specific areas of interest, such as a narrow winding corridor or campus, thus facilitating high diversity of collection geometries to mitigate shadowing. In addition, streamlined data processing workflows enable raw data from many different scans to be aggregated so that weak signals from significantly occluded surfaces can be turned into deliverable data products with high information utility. These innovations allow lidar operators to collect point clouds with the data densities commonly associated with UAV-lidar collections, but at a scale associated with larger aircraft. This large-scale, high-density data is a critical input for numerous applications.
The name “Geiger-mode” refers to the physical process by which the lidar detects the faint light pulses received by the lidar from the ground3. As each individual photon is received, an electrical pulse is detected and time-stamped, analogous to the clicks of a Geiger-counter detecting radioactivity. The “clicks” are processed into point clouds using the time of flight of the laser pulse. What is different from the more common “linear mode” lidar is the remarkable sensitivity. A point in the product point cloud is typically established using only 5–10 “clicks” of the GM photodetector, arising from 15–30 photons received by the lidar. In contrast, a typical linear-mode system needs a minimum of approximately 300 received photons to reliably differentiate a real surface from the noise in the system. Because of this 10–20x lower light requirement, GM lidar systems can collect data at high rates from higher altitudes, simplifying operations in rugged terrain and collecting wider swaths on the ground. GM lidars normally use an array of these sensitive photodetectors, all operating in parallel on every laser pulse; array sizes range from 32×32 to 128×256. More advanced GM lidars utilize multiple arrays, enabling area collection rates of, for example, 700 km2 per hour at a point density of 50 points per square meter from an altitude of 10,000 ft (3000 m) 3DEO GM lidar sensors yield millions of interrogations per second, with a range resolution of 15–20 cm, and an angular resolution of 76 microradians, which at 3000 m (9800 ft) yields about 23 cm horizontal resolution. Figure 1 shows 3DEO’s Zion-B lidar system in operational use.

Figure 1: Zion-B lidar system mounted in a Commander 500 aircraft on a mapping collection in North Dakota.
Essential to making these high point densities useful is collecting the point clouds from many different viewpoints to overcome the common shortcoming of shadowing and occlusions in lidar products. 3DEO has developed an agile geo-referenced scanning method4 that provides the flexibility required to achieve high angular diversity, which is crucial in highly foliated scenes to “poke through” the foliage to the ground layer5. The combined laser and camera optical paths may be scanned anywhere in the 40º x 40º field of regard of the system. In a mapping style collection, the area is partitioned into multiple swaths with sufficient overlap. Each swath is broken up into polygons of several hundred meters size, and each polygon is scanned multiple times over the course of the flight path, resulting in several total looks per polygon. By engineering the polygons appropriately, the amount of angular diversity per pass can be matched to the needs of the project. For foliage penetration and urban mapping, typically high angular diversity is chosen, whereas for wide-area mapping of unforested scenes only a single scan of each polygon is needed.
To make use of the high angular diversity from many views, 3DEO has developed a processing workflow and algorithms to coalesce all the information into one representation of the scene. The raw sensor data is extracted to create a raw 3D point cloud for each individual scan. The scans are aligned, combined and then processed together in order to find surfaces whose lidar echoes were too weak to detect from any single scan. The level of detail in the scenes of the aggregated point cloud can be compared to point densities obtained with traditional UAV-lidar but obtained at a much higher area collection rate. From the aggregated point clouds, standard derived products may be obtained such as bare earth digital terrain models (DTMs), digital surface models (DSMs), and height above ground (HAG).
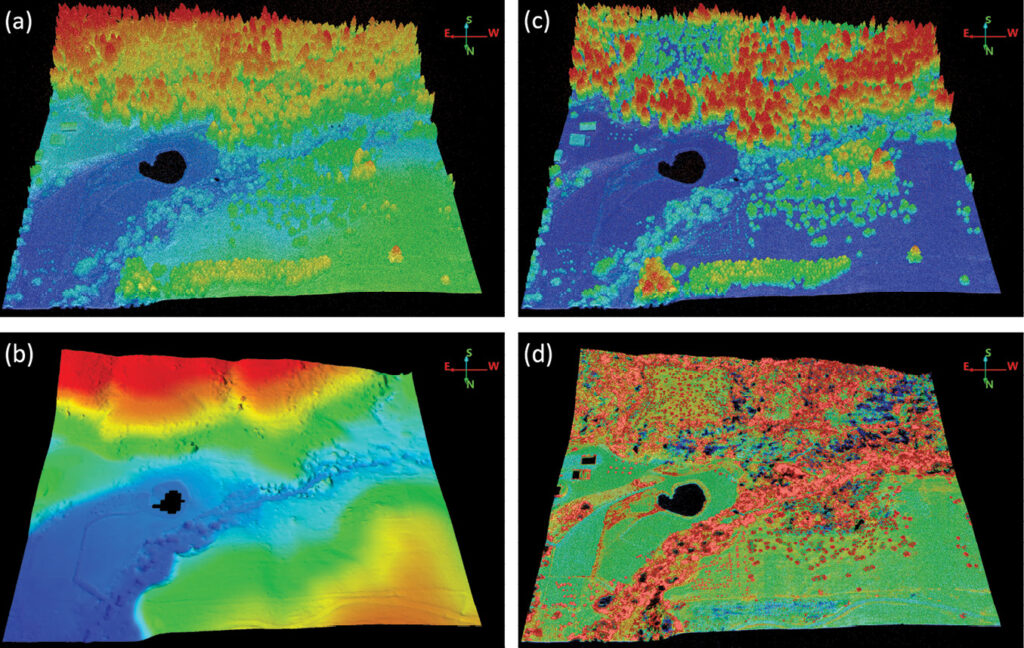
Figure 2: Sample mapping collection area of about 800 x 800 m in North Idaho, obtained with 3DEO’s Zion-A sensor: (a) colored by elevation, range 775–833 m; (b) DTM generated by SHR3D6, colored by elevation, range 775–808 m; (c) colored by height above ground (HAG), range 0–30 m; (d) cropped by HAG to 0–2 m, and recolored to highlight trails and other features in the human activity layer.
To show how all these unique characteristics of 3DEO’s GM lidar sensors combine together, we present a practical example of a site in North Idaho, which was collected from 5000 ft (1500 m) above ground level (AGL) at a rate of 45–50 km2 per hour per pass using our first-generation mapping system, Zion-A. The mapping was designed to probe everywhere on the ground from two flight passes offset from each other to illuminate two opposite sides of objects. The effective area collection rate was 27 km2 per hour. The area collected was about 68 km2, and each polygon was about 400 m x 400 m. Each polygon was scanned approximately eight times over the course of the two passes. Figure 2 shows the same sample area four different ways. The area is comprised of four abutting polygons, covering an area of about 800 x 800 m. The four different panels show different cropping and coloring schemes to indicate data utility. Figure 3 shows a transect through a portion of the area with high foliage. A ground layer is clearly visible as well as the stems of the trees. This level of detail and simultaneous fast acquisition rate are made possible by GM technology: the angular diversity is enabled through the geo-referenced scanning capability; and the GM-optimized algorithms process all the views into an aggregated point cloud. 3DEO’s second generation system, Zion-B, would have collected the same data quality at a rate exceeding 50 km2 per hour.
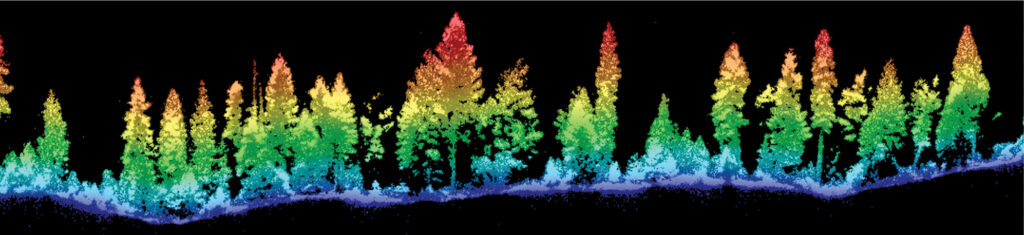
Figure 3: Transect of 4 m width over a highly foliated area in North Idaho collected by 3DEO’s Zion-A sensor. Colored by height above ground, range 0–30 m.
The ability of GM lidar to collect high-density point clouds rapidly at large scale makes it especially suited to disaster response applications. Rapid response timelines are critical for decision makers, so prompt collection and automated processing and exploitation are desirable. An example of rapid deployment and processing is a collection in Leominster, Massachusetts immediately following torrential rain and flooding in September 2023. We performed a dense target collection of 0.26 km2 size over the worst-hit area. Since the target area is small enough to fit within the field of regard (FOR) of the sensor, for each flight line the entire target is scanned many times from multiple viewing angles, and from 3–4 different flight lines each at different headings. This yields considerable angular diversity and data density, resulting in incredibly detailed lidar products. Figure 4 shows a section of the target-mode collection around Pleasant Street, performed two days after the flooding and again fourteen days later. Flooding washed out the road, but it had been repaired by the second collection. Possible post-disaster metrics include locating structural damage, accurate assessment of debris locations and volumes, and powerline continuity. The high resolution of the GM products is anticipated to be a key enabler for accurate decision-support algorithms based on AI/ML.
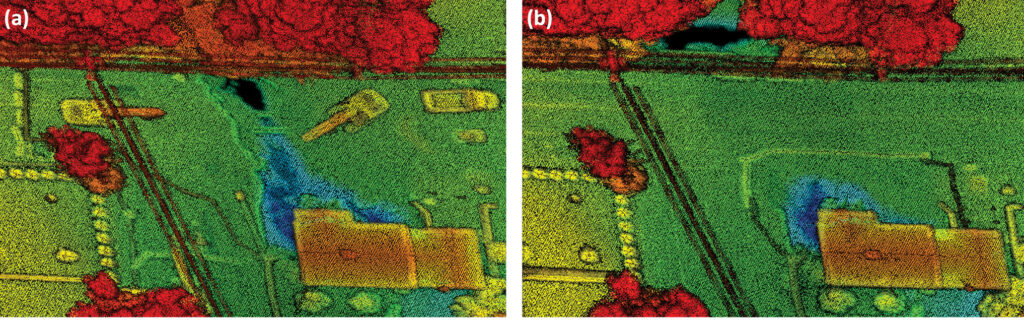
Figure 4: 3DEO’s Zion-B sensor captured road washout and repair in Leominster, Massachusetts after a tremendous flood in September 2023. Images are colored blue-to-red according to height, in the range 95–115 m. Imagery obtained on September 14th (a) shows part of the road washed out due to a broken culvert that ran under the road and under a house, exposing underground pipes and the foundation of the house. It also shows barriers on the road, excavators, and support vehicles. Imagery obtained on September 28th (b) shows the repaired section of road that appears darker in intensity due to the lower reflectivity of the freshly asphalted area, and shows the remaining sinkhole around the house. These details and the visible power lines indicate the exquisite detail of target-mode collection type.
A natural extension beyond airborne mapping applications is ground-based systems for airspace surveillance. Under SBIR funding from the ARMY ERDC’s Geospatial Research Laboratory (GRL), 3DEO developed and conducted proof-of-concept tests of real-time detection and tracking of individual birds within large flocks at standoff distances of approximately 600 m.7 The high data rates enabled by GM lidars and the use of array-based detectors enable near-video-rate 3D imaging at relevant standoff and field of view for a variety of airspace surveillance applications. Figure 5 describes one of the field tests.
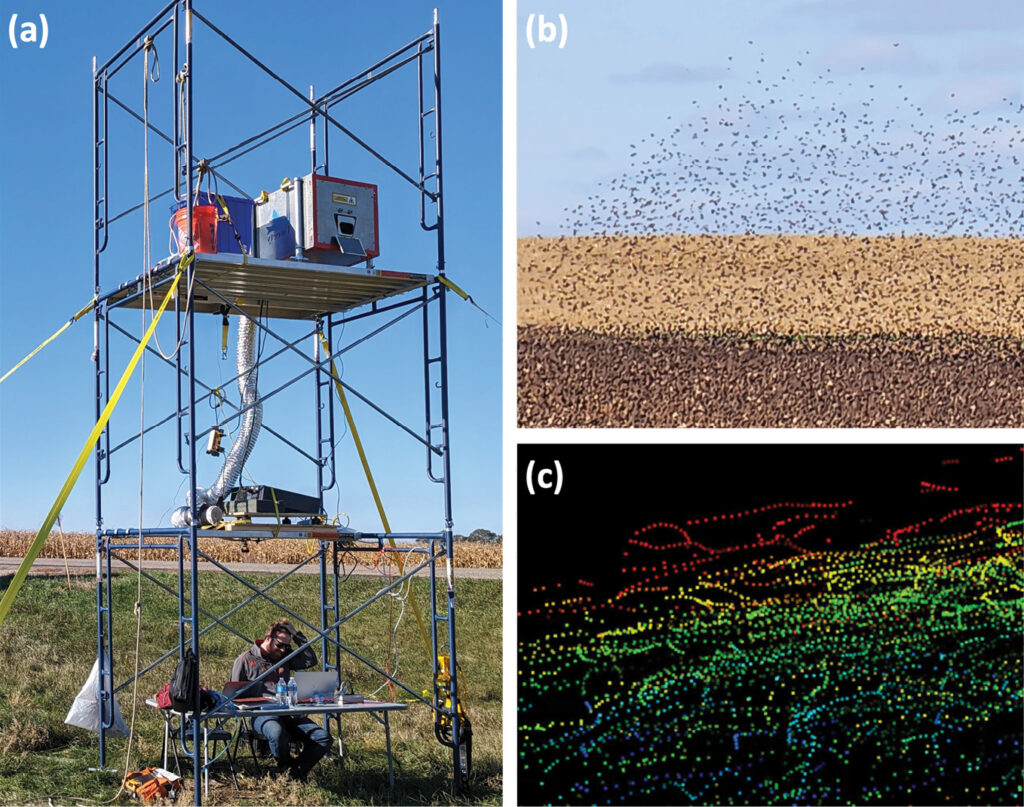
Figure 5: 3DEO’s ground-based lidar system, Tweety, developed for real-time bird tracking: (a) sensor setup near Jamestown, North Dakota; (b) flock of red-winged blackbirds being imaged by the lidar; (c) static image of a few seconds of 3D bird tracks where each color represents a unique tracked object and each dot is one step in a multi-second track.
As GM lidar technology moves from niche and proprietary users into mainstream availability, we hope to see new applications enabled by the high point density, high collection rates, and affordable scalability to wide areas.
About 3DEO
![]() Dale Fried founded 3DEO, Inc.* in 2014 after developing advanced GM lidar systems and concepts for the US Government at MIT Lincoln Laboratory. It became clear that features of GM lidar that were compelling for defense and security applications were also attractive in the commercial geospatial world: high data collection rate, high sensitivity to weak returns, flexible software-based signal extraction techniques, and scanning techniques enabled by camera-based receivers.
Dale Fried founded 3DEO, Inc.* in 2014 after developing advanced GM lidar systems and concepts for the US Government at MIT Lincoln Laboratory. It became clear that features of GM lidar that were compelling for defense and security applications were also attractive in the commercial geospatial world: high data collection rate, high sensitivity to weak returns, flexible software-based signal extraction techniques, and scanning techniques enabled by camera-based receivers.
3DEO has grown organically without external investments through engineering consulting and data-collection projects, and now offers complete GM lidar systems for sale and lease. The complete systems include software tools for mission planning, airborne GM sensor hardware, and 3DEO-developed software for extracting the raw data into 3D point clouds, all developed by 3DEO. To ensure that sensor operators have confidence in the final data products they deliver to their customers, 3DEO provides a complete software suite for processing, allowing them to control the workflow and establish predictable product quality.
3DEO is privately held, with employees holding the great majority of the equity rights. The team is dedicated to building “the kind of company we want to work at”. 3DEO takes personal interest in the success of its clients and customers, helping them understand where and how the technology may be useful in their projects. Customized solutions are often crafted to meet unique challenges. 3DEO is headquartered in Norwood, Massachusetts, near Boston’s academic and high-technology communities. The Norwood offices and laboratory are located at the Norwood Municipal Airport (KOWD). 3DEO’s second office is in Orem, Utah, near local universities and the incredible outdoor recreational opportunities of the mountain west. 3DEO’s third office is in Frankfort, Indiana, the middle of America’s heartland.
3DEO staff includes: founder Dale Fried, who serves as CEO; Brandon Call (joined 2015), director of software engineering; and Christopher Reichert (joined 2017), director of lidar operations. Chris, Brandon, and Dale worked together at MIT Lincoln Laboratory on GM lidar programs for DoD intelligence, surveillance, and reconnaissance applications such as wide-area mapping and foliage penetration. 3DEO’s team has grown to 15 technical and professional staff, including a dozen engineers and physicists.
References
1 Khan, M.J. et al., 2024. Remote sensing impact of single-photon sensitive airborne lidar systems based on Geiger-mode avalanche photodiode arrays, IGARSS 2024 – 2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 2024, pp. 2455-2459; doi: 10.1109/IGARSS53475.2024.10641168.
2 3DEO Scanning: https://www.youtube.com/watch?v=9saTWdozGsc
3 B.R. Call, D. Kelley, D.G. Fried, C. Reichert, K. Reichel-Vischi and A. Eldredge, 2022. Low SWaP, commercially-available Geiger-mode lidar system, Proc. SPIE 12110, Laser Radar Technology and Applications XXVII, 1211008, 3 June 2022; https://doi.org/10.1117/12.2619111.
4 B.R. Call, D.G. Fried, D. Kelley and C. Reichert, 2022. Dynamic geo-referenced scanning of aerial lidar systems, Proc. SPIE 12110, Laser Radar Technology and Applications XXVII, 121100A,3 June 2022; https://doi.org/10.1117/12.2619105.
5 B.R. Call, D.G. Fried, D. Kelley, K. Reichel-Vischi and C. Reichert, 2024. Assessment of foliage poke-through capabilities of an airborne Geiger-mode lidar, Proc. SPIE 13049, Laser Radar Technology and Applications XXIX, 130490I, 5 June 2024; https://doi.org/10.1117/12.3025035.
6 SHR3D: https://github.com/pubgeo/pubgeo
7 A.M. Eldredge, B. Call, D.G. Fried, B. Robinson, T. Mangum, D. Kelley, K. Reichel-Vischi and C. Sturm, 2024. A Geiger-mode lidar system for real-time detection and tracking of individual birds in large dense flocks, Proc. SPIE 13049, Laser Radar Technology and Applications XXIX, 1304906, 5 June 2024; https://doi.org/10.1117/12.3025089.