There is a strong case for adding Total Propagated Uncertainty to the LAS specification, but it would almost certainly increase cost.
The Geo Week 2024 conference provided many opportunities for lidar professionals to gather, exchange ideas, and explore new technologies. Since one of the participating organizations was the American Society for Photogrammetry and Remote Sensing (ASPRS), the lidar community enjoyed additional opportunities to share ideas pertaining to the newly released Edition 2 of the ASPRS Positional Accuracy Standards for Geospatial Data1 and the soon-to-be-released ASPRS LAS 1.5 specification. Those who have participated in the ASPRS Lidar Division and its LAS Working Group are well aware that one of the hottest and more contested topics over the past few meetings has been the addition of “propagated uncertainty” to the LAS specification2.
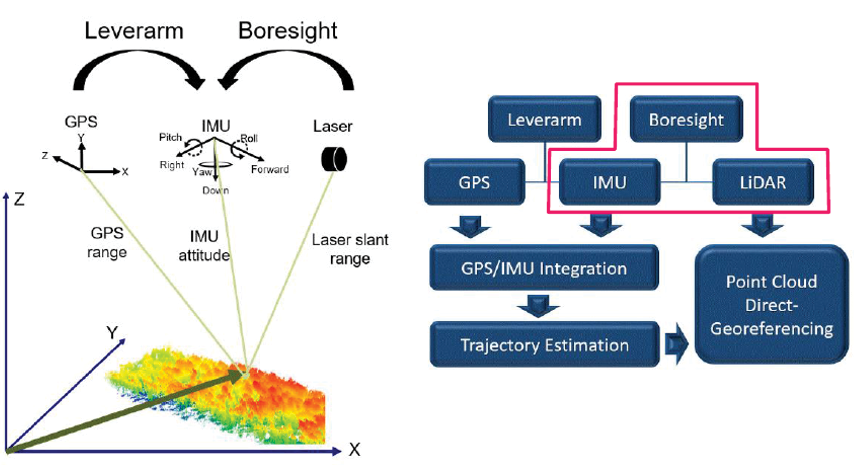
Figure 1: The use of GPS, IMU, and laser ranging measurements to create a directly georeferenced point cloud. Lever-arm offsets and boresight measurements also contribute to the overall accuracy of the point cloud. Image credit: DEM Users Manual, 3rd edition — Maune, D.F. and A. Nayegandhi (eds.), 2018. Digital Elevation Model Technologies and Applications: The DEM Users Manual, 3rd edition, American Society for Photogrammetry and Remote Sensing, Bethesda, Maryland, 652 pp, p228.
One of the most significant new features in ASPRS Positional Accuracy Standards for Digital Geographic Data, Edition 23 is the reference to including the uncertainty in Global Positioning System (GPS)/Global Navigation Satellite System (GNSS) positions when determining the absolute accuracy of lidar surveys (i.e. considering the accuracy of surveyed checkpoints when computing the accuracy of the final product). This same philosophy can be extended to include the measured variability of the lidar positioning components, the mechanical/optical components producing the lidar pulse, the inertial measurement unit (IMU), and the on-board and external GPS (Figure 1). As these uncertainty values would be unique for each pulse, the question becomes: should uncertainty values be incorporated into the LAS (1.6? 2.0?) specification?
While this may seem like a new approach to assessing the overall positional accuracy of each lidar pulse, it is certainly (pun intended) not a new idea. In the undersea world of sonar bathymetry, especially in water too deep to obtain independent survey checkpoints, the Total Propagated Uncertainty (TPU) has been the standard of the National Oceanic and Atmospheric Administration (NOAA) and the International Hydrographic Organization (IHO) for assessing positional accuracy. By convention, TPU is expressed as a combination of Total Horizontal Uncertainty (THU) and Total Vertical Uncertainty (TVU). Moreover, TPU has been a research topic in topobathymetric lidar for several years with several high-profile agencies, including NOAA, the U.S. Army Corps of Engineers (USACE), the Joint Airborne Lidar Bathymetry Technical Center of Expertise (JALBTCX), and research universities, such as Oregon State University.
TPU considers the random (not systematic) errors associated with each lidar measurement and the fact that each lidar measurement is an estimate with an associated uncertainty. The uncertainty is a combination of multiple factors, including but not limited to timing errors (GPS), and electrical and mechanical positioning errors (IMU). In the case of aerial lidar, laser ranging errors can be caused by scan angles, beam divergence, flying height, size of the laser footprint as the beam interacts with the ground and objects above the ground, as well as local environmental and/or atmospheric conditions. Any errors in lever-arm offsets and boresight calculations should be included in TPU calculations based on information derived from calibration tests. TPU models comprising Total Vertical Uncertainty (TVU) and Total Horizontal Uncertainty (THU) components are already widely used for acoustic survey systems, such as multi-beam echosounders, and can be easily extended to both topobathymetric and topographic lidar surveys.
The case for adding TPU to aerial topographic lidar
There are three logical arguments for including either a combined TPU or two separate measurements (THU and TVU) to the LAS specification:
- Adding either would provide additional information to the end-user regarding each lidar measurement. In the current LAS specification (LAS 1.4 – R15)4, it is assumed that, barring systematic errors which should have been removed from the dataset, each measurement has the same precision. While attributes associated with each pulse, such as “Scan Angle Rank” are useful, there is no error associated with each to help the end-user assess the mechanical/optical accuracy. Adding TPU (or THU/TVU) would provide the end-user with information to help assess the non-systematic errors in the measurements.
- Specifying either TPU or THU/TVU to the LAS file would be relatively simple and cost-effective. As Point Data Record (PDR) formats 1-5 are being retired, other relevant fields such as GPS time are already required, and there are currently unused “ASPRS reserved” and/or “User Definable” values, so specifying TPU (or THU and TVU) would be relatively simple in a new PDR format.
- TPU offers a consistent way to measure the uncertainty of each lidar-derived XYZ location and incorporates uncertainties from various sources that contribute towards the errors for each measurement as described above.
The case against adding TPU to terrestrial aerial lidar
The arguments against adding TPU or THU/TVU to the LAS specification include:
- There is no outcry in the end-user community for TPU to be included. To the end-user, TPU is still an academic/research endeavor that brings no real monetary value to the data, especially if adding it will incur additional cost. The end-user is more concerned with absolute accuracy and positioning and how different materials and/or terrains affect that accuracy.
- As currently proposed, TPU (THU and TVU) would be a function of testing and reporting by manufacturers, rather than in situ testing. This could potentially lead to a manufacturer’s “arms race”, for better or worse, to report ever more favorable TPU measurements. While this may improve the overall measurement assessment, it will be dependent on some independent verification, which may, in turn, add costs to the instruments.
Parting thoughts and recommendations
Even though there is no end-user demand to includer propagated uncertainty in the LAS specification, the benefits of doing so may outweigh the disadvantages. Having more information regarding the accuracy of the lidar product can only be beneficial to the community. However, safeguarding the integrity of the information with independently verifiable methods ensures that the information is truly useful. Doing so means there will likely be additional pre-mission calibration or testing, which could result in additional cost to the end-user.
We welcome your comments on this topic, and remember, you can also participate in and leave comments with the ASPRS LAS Working Group.
1 asprs.org/revisions-to-the-asprs-positional-accuracy-standards-for-geospatial-data-2023
2 Readers interested in joining the LAS Working Group, which is open to the public, can create a free ASPRS account at community.asprs.org/home.
3 publicdocuments.asprs.org/PositionalAccuracyStd-Ed2-V1
4 asprs.org/wp-content/uploads/2019/07/LAS_1_4_r15.pdf