Over the past few decades, airborne topographic lidar has been the “go to” technology to create high-resolution digital elevation models (DEMs) of land surfaces. Advances in laser ranging, inertial measurement units (IMUs), and Global Navigation Satellite System (GNSS) technology have resulted in higher resolution and more accurate DEMs, improved bare-earth surface under vegetation, and better definition of above-ground features over a regional scale. These technology improvements have enabled the near completion of the USGS 3D National Elevation Program (3DEP) with 96% of the nation mapped with Quality Level 2 (QL) or better lidar topography data.
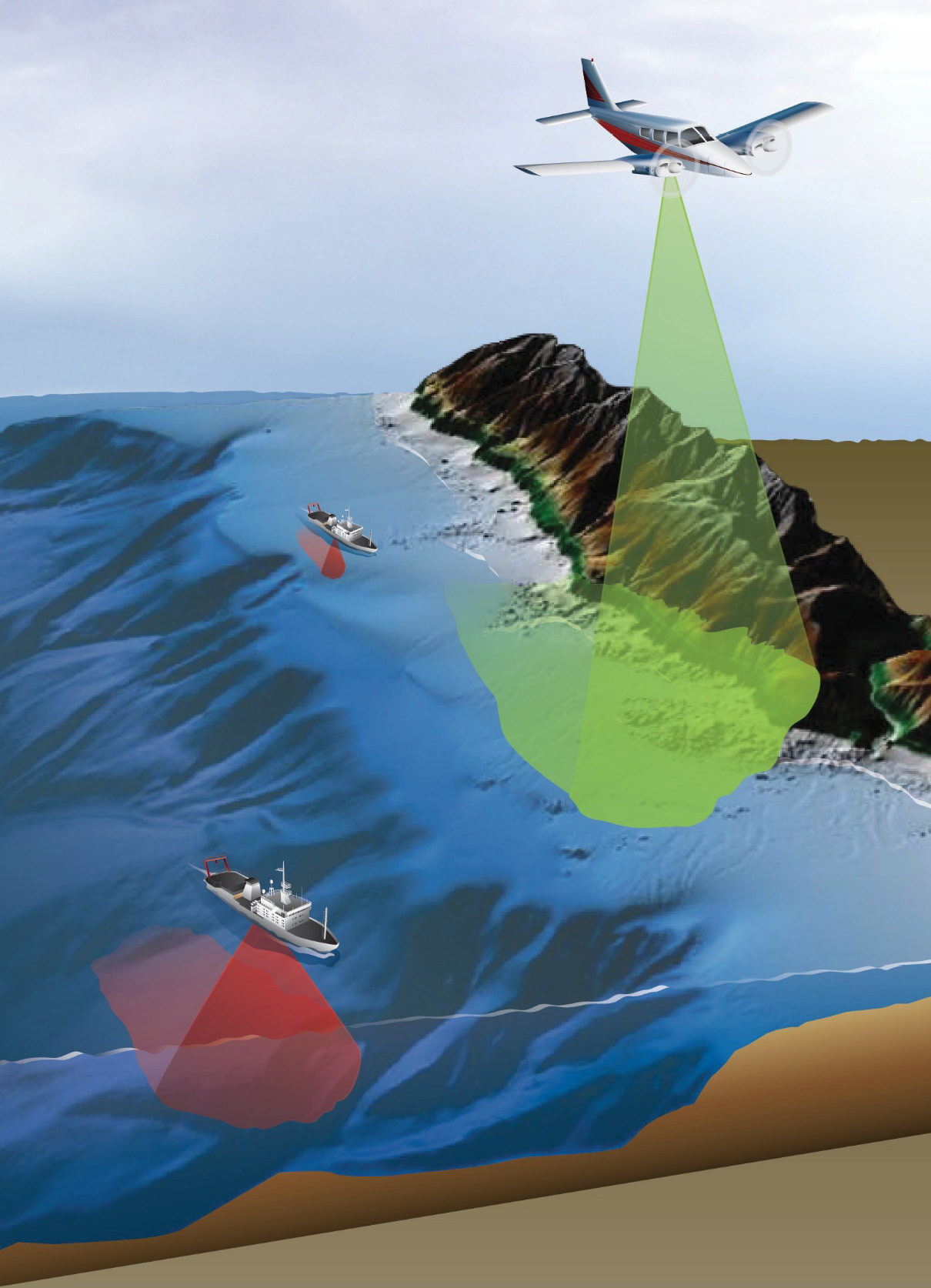
Figure 1: The collection of airborne lidar bathymetry (ALB) data in the nearshore zone followed by vessel-based MBES collection is the most efficient method to derive submerged topography.
The need for high-resolution bathymetry data in the nearshore coastal zone is well documented in a recent study1 completed by Dewberry for NOAA and USGS. The 3D Nation Elevation Requirements and Benefits Study was performed to document national requirements for improved topographic and bathymetric elevation data, estimate the benefits and costs of meeting these requirements, and evaluate multiple national enhanced program implementation scenarios. The goals of this study were to capture inland, nearshore, and offshore topographic and bathymetric elevation data requirements and benefits and understand how those requirements and benefits dovetail in the nearshore coastal zone. The study was comprehensive with a total of 1,352 Mission Critical Activities (MCA) reported by study respondents from 45 federal agencies, 56 states and territories, and 58 non-governmental organizations. The 3D Nation Study identified $3.6 billion in annual benefits for inland, nearshore, and offshore bathymetry that could be realized if all needs were met.
In 2022, NOAA published an analysis of publicly accessible bathymetric data holdings within U.S. coastal, ocean, and Great Lakes waters to the outer limit of the Exclusive Economic Zone (EEZ). The analysis looked at all modern (post 1960) bathymetric data holdings at NOAA’s National Centers for Environmental Information (NCEI) and Office for Coastal Management (OCM). Actual soundings of multi-beam data (raw and processed), single-beam data (>1960), hydrographic surveys (>1960), bathymetric lidar, and crowdsourced bathymetry were included. The results showed that 52% of the US (and its territories) did not have a single sounding (measurement) within a 100-meter grid cell, and a large portion of the 48% area that is mapped can be considered “minimally mapped” with less than two soundings per 100 square meters and up to 60 years old. There is reason to believe that hydrography, in the U.S. and around the world, is in a state of crisis regarding the ability of professional hydrographic organizations to provide the needed and desired products within their budgets and in a timely manner. Conversely, the use of coastal areas by commercial and recreational concerns is growing at a rapid pace. Coastal zone engineers and managers need coastal bathymetric data for a wide variety of engineering and environmental applications. The need for high-resolution bathymetry data is real and requires the use of multiple mapping technologies to achieve full coverage.
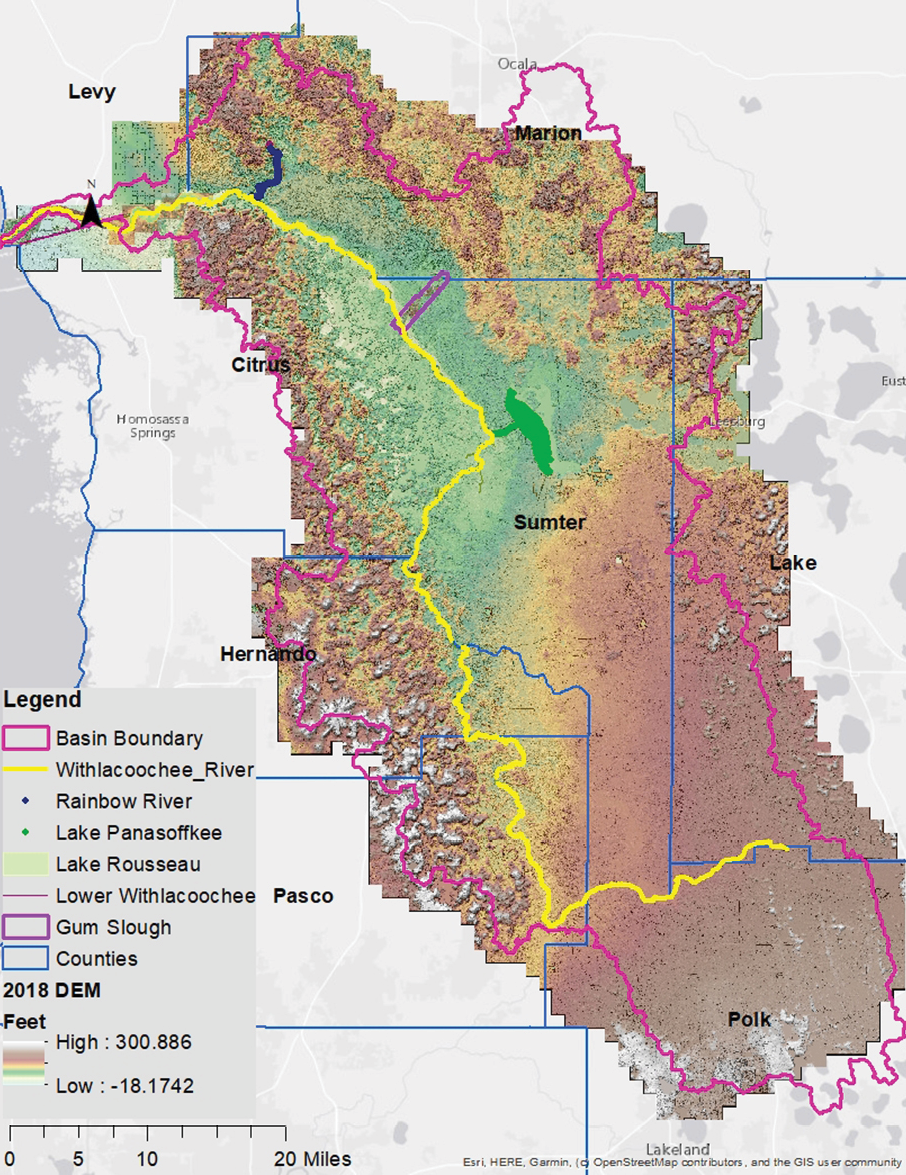
Figure 2: The “fly lidar first, fill-in gaps with sonar” philosophy was successfully implemented for the Lower Withlacoochee Watershed merged DEM by Dewberry.
Traditionally, the hydrographic community and the topographic community have operated in their own way—the hydrographic community has focused on vessel-based sonar/acoustic methods whereas the topographic community has used airborne lidar and even photogrammetry to derive land elevations. These vessel-based methods include the use of a single-beam echo sounder (SBES) or multi-beam echo sounder (MBES) systems to derive water depths. The hydrographic community has traditionally based its elevations on the tidal datum whereas the topographic community has used orthometric datums. The difference in reference datum manifests most at the land/water interface, often due to the varying definition for “shoreline” which can have significant scientific, engineering, social, economic, legal, and safety implications. The use of Airborne Lidar Bathymetry (ALB) helps bridge this divide.
Based on over several decades of operations, ALB (often referred to as airborne topobathymetric lidar) has proven to be an accurate, cost-effective, rapid, safe, and flexible method for surveying in shallow water and on coastlines where sonar systems are less efficient and can even be dangerous to operate. However, topobathymetric lidar has faced three basic challenges: the physics of light traveling through different media (air and water) and the ability of the lidar pulse to consistently reflect off the water surface and bottom; the reflectivity of the submerged bottom; and water column turbidity resulting from dissolved particulate/organic matter and suspended sediments, which is recognized to have an important role in obscuring the bathymetric ground. Inland waterways, known for dark, muck-covered bottoms, combined with tannic, dark waters, make for exceptionally challenging conditions for surveying with ALB sensors. However, the cost of operations for ALB systems are often 15-30% of the standard vessel-based survey cost, depending on location, depth, and survey density. In shallow depths the cost of vessel-based approaches is 10x higher if the goal is to obtain “wall to wall” coverage.
Given all these considerations, there is a need for the use of combined technologies to achieve complete bathymetry coverage from the shoreline to offshore. Using a “fly lidar first, fill-in with sonar” philosophy has enabled the most efficient use of these airborne and vessel-based technologies (Figure 1). Dewberry has conducted numerous ALB surveys ranging from the Great Lakes, to rivers in Virginia, to the coastal environments and watersheds in Florida. We applied a “fly lidar first, fill-in with sonar” approach to complex projects such as the Withlacoochee River Minimum Flows and Levels (MFL) survey. Based on this general approach, topobathymetric lidar data were collected using the Coastal Zone Mapping and Imaging Lidar (CZMIL-SuperNova) sensor. Any gaps in the data were then filled in using either existing or newly collected multi- and single-beam, crewed and un-crewed surface vehicle sonar, and conventional GPS/Pole-soundings to construct and ground-truth a seamless terrestrial-hydrographic (hydrospatial) DEM. A similar approach is currently being used by Florida Department of Environmental Protection (FDEP) for the Florida Seafloor Mapping Initiative. The project is separated into three phases. Phase one focuses on using topobathymetric lidar to collect bathymetry to the 20-meter isobath. This topobathymetric lidar phase spans approximately 58,000 km2. Phase two will focus on collecting MBES data to fill in the gaps resulting from the topobathymetric lidar collection activity, thereby resulting in the most efficient data collection methods and significant cost savings to FDEP. Phase 3 will focus on using MBES data for water depths between 20 meters and 200 meters, where the vessel-based technology is most efficient.
The creation of final seamless DEM using multiple data sources requires careful consideration of any offsets / gaps in the data and how they will be merged. The final seamless DEM for the Withlacoochee River model domain (Figure 2) was constructed using each data source to its fullest extent. In some cases, statistical kriging was used to densify the single-beam profiles, while in other cases, geometric smoothing techniques were used. 
1 dewberry.com/services/geospatial-mapping-and-survey/3d-nation-elevation-requirements-and-benefits-study