The test: to create accurate ground surface mapping, through vegetation, at 250 km per hour.
The Klau Geomatics Brumby LiDAR was put to the test over the South Dandalup forest, east of Perth, Western Australia. Flown in a Cessna Caravan at 135 knots (250 km/h), 300 ft (100m) above ground level. The data reveals spectacular results, with last returns generating an accurate terrain surface with reasonable point density, suitable for many applications.
200m line spacing (note scan width clipped by fuselage)
250km per hour
45 square km per hour captured
or 75 hectares (160 acres) per minute
Point density around 50 points per sq m or around one point per 150mm square.
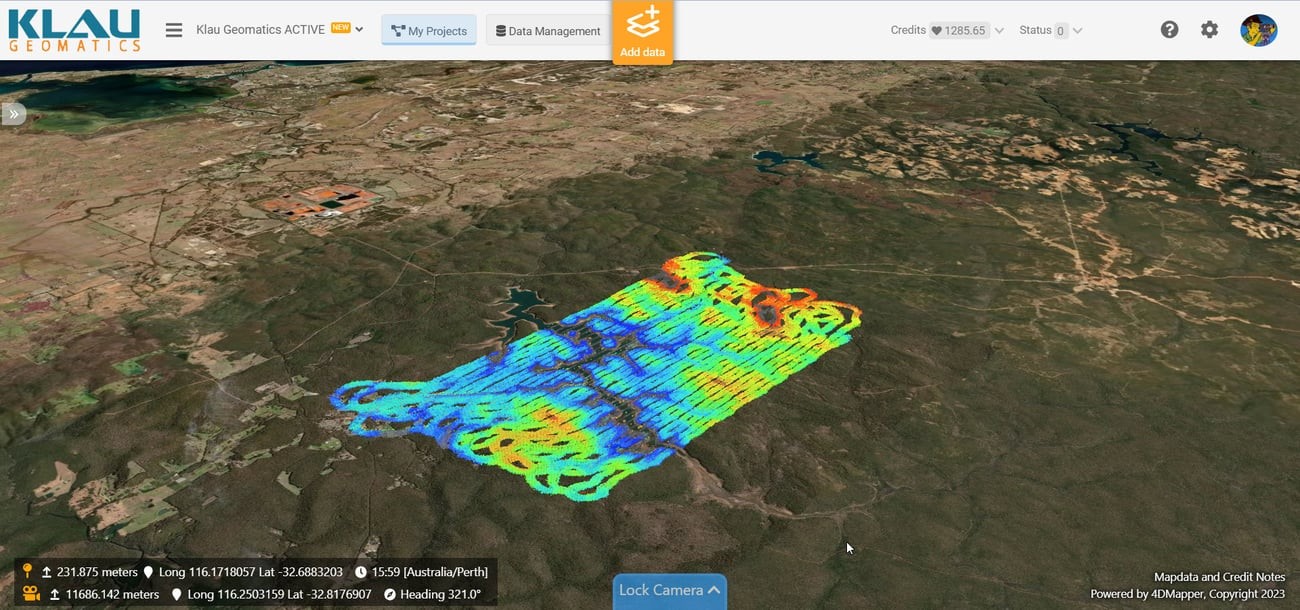
This data can be viewed here: https://beta.4dmapper.com/auth/share/s_11629_2UNEFLHY3A_/PZ51MLG3USGM3ZNJQXE3U00U1J0F2B5PB2PPPMGRZMHTV1AHQ5
The scan width was reduced due to the temporary install for the test, the edges of the hole in the fuselage limited the field of view. With correct installation the data would have full coverage.
Here’s what the vegetation looks like from the ground:

Streetview in the vicinity.
Then if you fly down through the pointcloud to see the ground, it looks like this. Note, this is just the last return data, it hasn’t had any post processing to reduce to ground.
These results show that the system is very well suited to many applications seeking a solid sample rate over large areas, quickly. Applications requiring higher point density, such as powerline scanning, will need slower or closer flights.
Now, those of you reading who have worked with LiDAR understand that the raw data capture is the easy part. The problems build up as the data processing workflow begins. You need a skilled operator running powerful compute capacity and software to try to keep up.
Currently, post-processing of Brumby data to generate a georeferenced point cloud is achieved in around 20% of the time it takes to capture. So a 4-hour flight, 180 sq km, will process in just 1 hr.
The Klau Geomatics team is working to reduce and even eliminate the LiDAR post-processing logjam. Currently, the data is processed into a georeferenced point cloud, in a projected coordinate system, with a geoid applied, including intensity, precision estimates, time, and other metadata in each point, all in around 20% of the time it takes to capture.
While delivery time may not be an issue for many, or they are just used to it being an arduous process, we believe that there are markets for this fast capture with fast if not an immediate turnaround, such as military, search and rescue, mining, and others who need fast accessible data, easily captured and delivered.
Please feel free to get in touch with me if you’d like more information. klau@geomatics.com.au +61 401 588 005 Rob Klau
