
Figure 1: The project site had considerable vegetation for a desert environment.
When the Merrick-Surdex Joint Venture (JV) saw the call for proposals for a US government 3DEP survey to deliver classified point clouds and lidar-derived forest biomass products in Arizona, they knew it would make for a challenging aerial survey.
As the 3DEP project moves westward toward the Rockies, terrain is getting more and more rugged. For this project, the terrain was four separate areas totaling 5000 square miles of mostly hilly desert with a surprising amount of vegetation (Figure 1). In addition, the survey requirements were for USGS QL1 data, which calls for relatively tight point density of 8 ppsm. This would be simple to achieve on the canopy itself, but the point spacing could suffer underneath the vegetation.
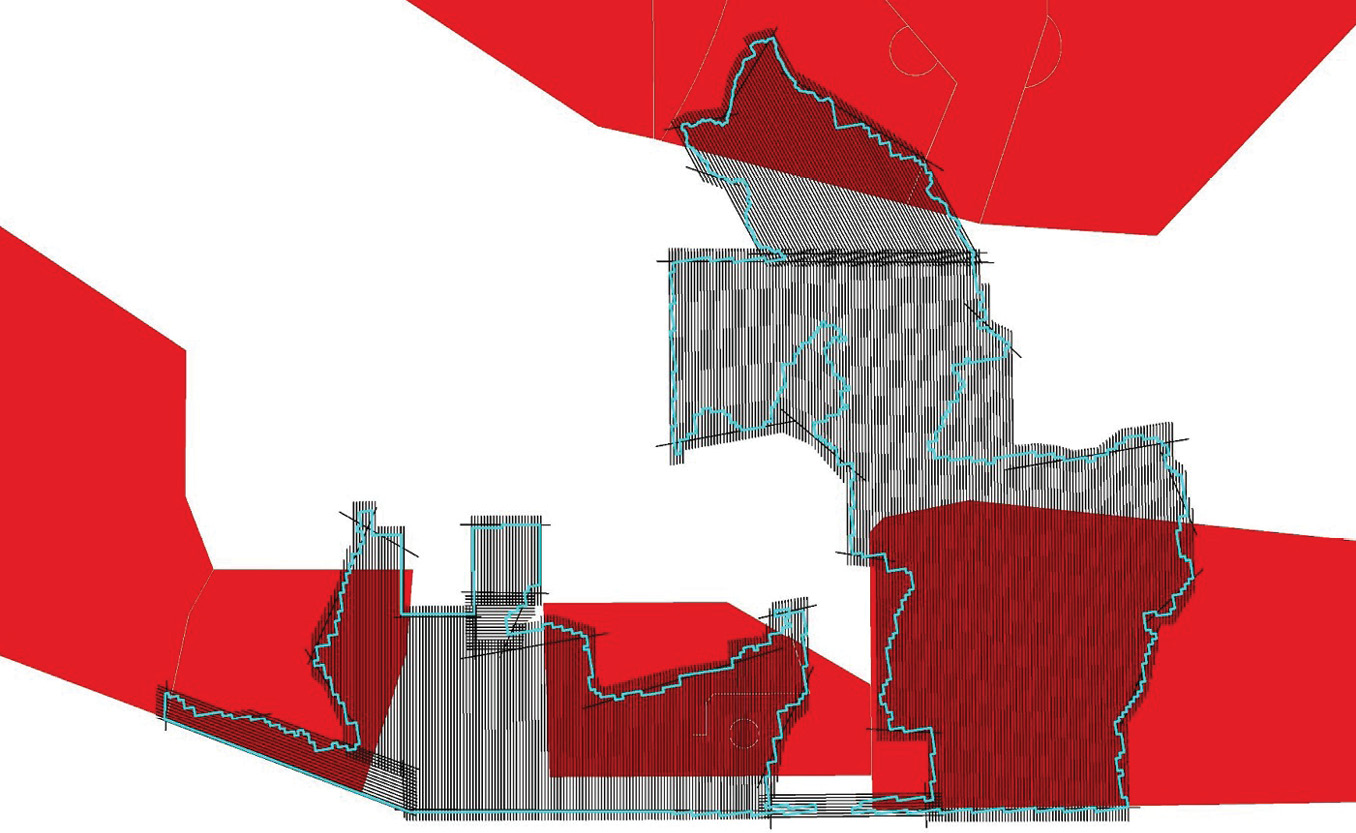
Figure 2: Restricted airspace (red) made it tricky to cover survey areas (blue outline) in a reasonable timeframe.
The westward trend of the 3DEP project presented another difficulty as more and more aerial survey areas contain special-use airspaces due to nearby military activities (Figure 2). Operators can fly such airspaces only at specific times, greatly complicating the flying calendar.
To tackle the terrain, vegetation, and restricted airspace, the Merrick-Surdex JV was eager to employ its Optech Galaxy ALTMs. Their SwathTRAK™ technology would maintain efficiency and point density in hilly terrain, while their small beam size would ensure penetration of thick canopy, mapping both its vertical vegetation and the ground below it. Finally, the uniquely tough conditions called for an ultra-efficient approach, so Surdex, acting as the collection entity for this JV project, installed two of its Galaxy Primes into a G2 configuration aboard its Cessna 414A (Figure 3).
About the G2

Figure 3: The Galaxy G2 installed in Surdex’s Cessna 414A.
In the G2 configuration, two Galaxy systems are installed on a single rigid platform supplied by Teledyne Optech. The dual system requires only a single aircraft hole of standard 19” size, even when integrated with two medium-format cameras. The sensors have a slight yaw rotation between them to make sure the scan lines are interleaved instead of phased atop of each other (Figure 4). Each Galaxy can be pitched to the user’s choice of either 2.5° or 7° from nadir. This configuration guarantees resolution on vertical targets (such as trees) and a forward and backward pitch for the optimal resolution.
The systems function like a single sensor for the survey. A single flight plan is developed for both sensors at once, and the operator controls the sensors during the aerial survey with a single laptop.
See PDF for more graphics
Flight speed benefits of G2 and Galaxy
As noted above, the western movement of 3DEP reaches more areas that can only be flown during particular times. In this case, surveying the restricted areas could only be done on the weekends, so there was a need to accelerate the flight plan. By employing the dual-sensor setup of the G2, the Merrick-Surdex JV team managed to cut the flying time in half compared to a single sensor and the project duration was decreased by several months (Figure 5).
The approach towards the Rockies is the other challenge as 3DEP progresses west. In contrast to the plains of the Midwest, the target areas are increasingly hilly. The project areas in Arizona were no exception. Such rough terrain often proves to be a problem for lidars with a fixed field of view, such as those with rotating polygonal mirrors. Flying over a valley widens the scan width on the ground and reduces the scan density; likewise, flying over a hilltop reduces the scan width on the ground, potentially causing gaps between lines. Operators can compensate for this by flying additional flightlines, but this increases the flight time—not an attractive option here given the restricted flying days.
Instead, the team decided to rely on the real-time dynamic FOV adjustments built into the Galaxy systems’ SwathTRAK™ technology. As the elevation dropped, the Galaxy systems reduced their FOVs to keep the swath widths and point densities on the ground even. Likewise, as the elevation increased, SwathTRAK widened the FOVs to make sure that they still captured the required swath. In the experience of the Merrick-Surdex JV, this technology reduces the collection costs by up to 40% in sufficiently rough terrain.
Multi-look surveying
Just because 3DEP is heading west, the vegetation is not necessarily lighter. This particular project contained fairly heavy scrub with occasional outbreaks of evergreen forest, and the client required an analysis of the vegetation. In this case, it helped that the G2 sensors were configured with a 7° pitch in opposite directions. Thus one sensor could scan up the front of each vertical surface while the other surveyed down the back of it, resulting in improved vertical fidelity and canopy penetration through the foliage.
They decided to expand on this benefit further by increasing the sidelap between adjacent flightlines to 55%. The flight area, therefore, was covered four times from four separate angles. This improved the vertical fidelity and canopy penetration even more, benefitting the resulting DEMs and point density.
Accuracy
The next challenge was to make sure that the data fulfilled 3DEP’s QL1 accuracy requirements. The Merrick-Surdex JV strives to achieve QL0 accuracy requirements on all Galaxy surveys, even when the specifications are less strict. Part of this is the inherent accuracy of the system and its LMS processing suite, but the team takes extra steps to ensure accurate calibration.
Firstly, they focus heavily on the calibration of each lidar’s sensor model. LMS automates this well, but must be used frequently and effectively for the dozens of dual-sensor missions that made up this project. Secondly, a crossline is placed at both ends of all flightlines. Traditionally, a single crossline would be placed across the middle of the flightlines, but this means that the lines can “see-saw” up and down at their ends. Because the autocalibration locks the heights along the crosslines, the crosslines at the ends preclude this see-saw effect. Lastly, they use dynamic adjustment processes to minimize any small, remaining separations between swaths.
The QL1 requirements called for the accuracy for calibration and fitment of all flightlines to be ≤8 cm RMSDZ, while the absolute accuracy measured to checkpoints has to be ≤10 cm RMSEZ. The Galaxy systems achieved 3.5 cm RMSDZ relative accuracy and under 5 cm RMSEZ absolute accuracy, easily exceeding 3DEP’s QL1 accuracy requirements.
Data production
After calibration was finished, the Merrick-Surdex JV moved on to creating the deliverables. This particular 3DEP project required several items, beginning with point classification into ground and low/medium/high vegetation classes. Automatic classification was run on the data first, then manual cleanup was performed with the MARS lidar software suite, developed in-house, to greatly enhance the classification accuracy.
Another 3DEP requirement was DEMs that would be used for hydrological analysis. Considering the amount of vegetation in the area, the quality of the DEMs would depend on how well the Merrick-Surdex JV could penetrate the canopy and reach the ground underneath. Thanks to the Galaxy’s small beam size plus the four-way views achieved by the G2’s double pass, excellent ground penetration was achived and the client was pleased with the quality of the resulting DEMs.
The last 3DEP deliverable was tree canopy polygons and tree crown points. To generate these, the team created a multi-step algorithm with both commercial-off-the-shelf and in-house elements. Since imagery collection was not part of the contract, they designed the algorithm to work entirely on lidar points.
Still, the team wanted to check that trees weren’t being missed. They verified their lidar-detected canopies against imagery from the National Agriculture Imagery Program (NAIP), which in some areas had been coincidentally collected just a few months before the lidar data. The results of the test showed that their algorithm was effective and very few trees were missed.
Finally, although 3DEP didn’t require it for this particular project, the team also produced a canopy height model (CHM) for analysis using the US Forest Service FUSION software. Several characteristics were revealed, such as a distinct increase in tree height in valleys, a result of the extra moisture there.
Point density
While data accuracy was not too difficult to achieve for this project, more care had to be taken to achieve the 8-ppsm point density of 3DEP’s QL1 requirement. The Galaxy itself was very useful with its 100%-effective pulse repetition frequency, which ensured that every laser pulse fired could actually reach the ground. As a result, there was no need to increase the PRF to compensate for lost shots.
To achieve QL1 point density, the Merrick-Surdex JV planned for each sensor to achieve about 2.5 ppsm per pass. Since there were effectively four passes over each area (thanks to the G2’s two sensors and the 55% sidelap), this resulted in a total planned density of 10 ppsm.
The resulting median point density for all classes was 12.7 ppsm, while density for vegetation was 21 and the density for just the ground points was 12.6 (Figures 6 and 7), easily meeting the requirements for the QL1 specification.
Even underneath the canopy polygons, the system still managed 6.5 ppsm, showing that the G2 managed to achieve excellent penetration. Beyond 3DEP, such foliage penetration will become a very pertinent factor in airborne survey, because many clients are adding numerical specifications for sub-canopy point density. This is especially true for heavily vegetated parts of western North America, where one client has required that at least 65% of sub-canopy area be captured with at least 3 ppsm. In this regard, the Galaxy in its G2 configuration already meets and exceeds the most stringent density requirements being issued.
Conclusion
This project shows that the G2 dual-sensor Galaxy is especially useful for tackling three main tasks, for forest mapping in general and for the 3DEP project in particular, especially as 3DEP moves westward:
- Mapping areas with vertical features like tree trunks with high fidelity
- Collecting efficiently when airspace restrictions limit survey time
- Penetrating foliage to collect high-density data underneath the canopy
In addition, Merrick is also interested in testing another possible use for the G2: powerline surveying in a fixed-wing aircraft. Of course, powerlines are normally collected with a slower rotary-wing aircraft to ensure sufficient point density and to follow the powerline closely. Merrick believes, however, that the very high point output of the G2, combined with its excellent foliage penetration and the Galaxy’s line-tracking ability could make fixed-wing surveys a much faster alternative to rotary-wing for some transmission and distribution line projects.
Finally, this survey in Arizona shows the operational flexibility of the Galaxy G2 system. Afterwards, the Merrick-Surdex JV could split up the two Galaxy Primes again and use them separately in survey projects with less strenuous requirements. This gives the Merrick-Surdex JV the ability to match the equipment’s capabilities to the project’s requirements, making the best use of the lidar systems.
Matt Bethel is Merrick & Company’s Director of Operations and Technology for its Geomatics business unit. He has 25 years experience in the aerial mapping industry.
Andrew Moller is a technical writer at Teledyne Optech with almost a decade of experience in writing for the lidar industry.