

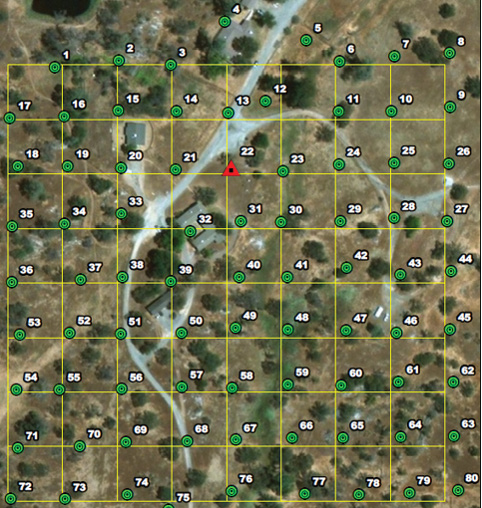
Figure 1: SJER test site.
Note: See the PDF for more graphics
Lidar systems based on small unmanned aerial systems (sUAS) are rapidly advancing. This research investigates a Microdrones mdLiDAR3000DL sUAS-based lidar system. Accuracy analysis of data is acquired for two different sites. These sites have dense ground control fields established using high-accuracy ground surveying methods. A lidar point cloud acquired from a manned helicopter was utilized to evaluate the mdLiDAR3000DL performance on paved roads, unpaved roads, and roof tops.
Standards and test fields

Microdrones sUAS-lidar

Figure 2: Cal Fire test site.
The Microdrones mdLiDAR3000DL is based on a md4-3000 quadcopter with a takeoff weight 14.8 kg (Figure 5). The payload consists of a Sony RX1R II RGB camera (not used in this research), Riegl miniVUX-1DL lidar system and Applanix APX-20 UAV PPK GNSS/IMU system.
The GNSS/IMU system has dual-frequency GNSS (L1 and L2) and IMU at 200 Hz with 0.025° heading accuracy and 0.015° roll and pitch accuracy. The expected accuracy specified by the manufacturer is 1-3 cm RMSEXY horizontally and 2-4 cm RMSEZ vertically.
The Riegl miniVUX-1DL builds upon the miniature UAV laser scanner Riegl miniVUX-1UAV. “DL” refers to “downward-looking”, indicating special design parameters for corridor mapping (downward-looking, optimized field of view of 46°, small size, 2.4 kg). The sensor is capable of five returns per laser shot. With a scan rate of 150 Hz, it can produce 100K laser pulses per second2.

Figure 3: Flights of manned helicopter over SJER test site.
The following mapping parameters were used at each test site: SJER – flying height 75 m AGL, flight speed 5 m/s, 50% sidelap; Cal Fire—80 m AGL, 5 m/s, 50%. The downward-looking, forward/backward-looking, rotating cone wedge pattern generates a well-distributed, circular scan with a point density of 270 points/m2 (Figure 6).
Vertical accuracy
Check points
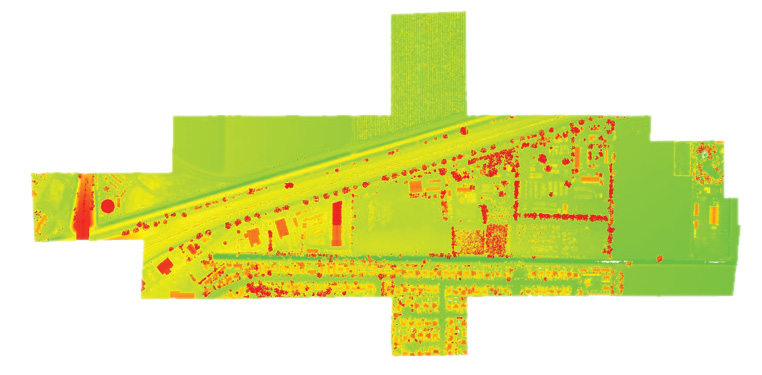
Figure 4: Flights of manned helicopter over Cal Fire test site.
Using the lidar point cloud, a 5 cm grid digital elevation model (DEM) was generated for both test sites. The check-point elevations were interpolated from the DEM and compared to the ground elevations obtained from digital leveling. The statistical results of this comparison are shown in Table 2. The vertical RMSEZ for SJER and Cal Fire test sites are 1.8 cm and 1.4 cm respectively, with less than 1 cm bias. The noise ranged between 6 and 9 cm. The vertical error contour maps for both test sites are shown in Figures 7 and 8. These maps show no doming effect or large noise in the check point results.
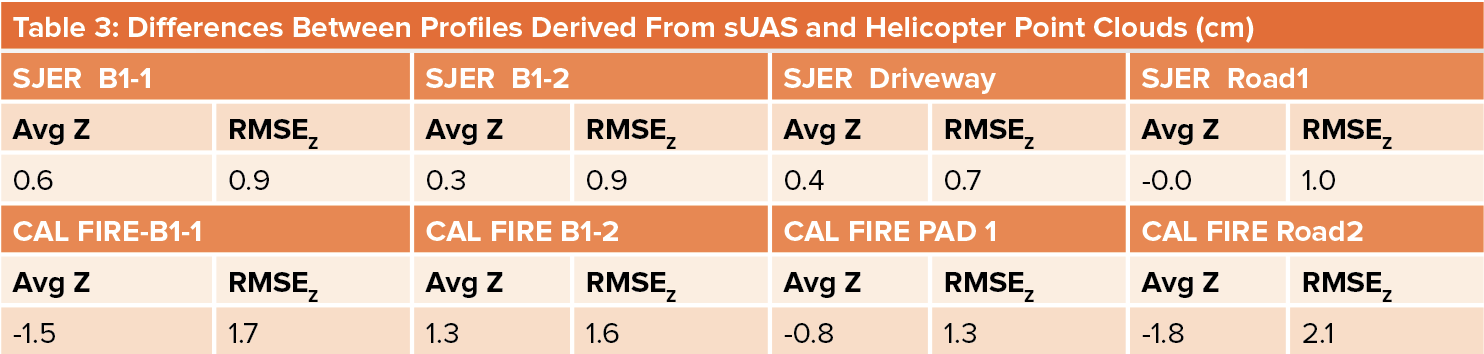
Profiles

Conclusions

Figure 5: Microdrone sUAS.
This study demonstrates the potential capability of an sUAS equipped with lidar (Microdrones mdLiDAR3000DL) to meet large-scale mapping specifications with a factor of safety. Site-specific considerations include extent of area of interest, terrain relief, vegetation coverage, surface variability, GNSS requirements, system specifications, flight-planning parameters, and site control requirements. These factors must be considered on an individual basis when evaluating system and site suitability and resulting accuracies.
Based on the test site conditions and system parameters, the test shows the system repeatability at two different test sites with varying height differences and land cover. It also validates the manufacturer’s vertical accuracy specification of 2-4 cm RMSEZ for these test sites.
Acknowledgement
The contents of this study reflect the views of the authors, who are responsible for the facts and the accuracy of the data presented herein.
Riadh Munjy, Ph.D, PE is Professor of Civil and Geomatics Engineering at California State University, Fresno.
Jacob Lopez is a graduate student at California State University, Fresno.
Chris Thornton, PLS is Chief—New Technology Systems Advanced Technology, Office of Land Surveys North Region Office of Surveyors, California Department of Transportation, Sacramento, California.
1 American Society for Photogrammetry and Remote Sensing (ASPRS), 2015. Positional Accuracy Standards for Digital Geospatial Data (Edition 1, Version 1.0. November, 2014), Photogrammetric Engineering & Remote Sensing, 81(3): A1-A26, March 2015. https://www.asprs.org/wp-content/uploads/2015/01/ASPRS_Positional_Accuracy_Standar-ds_Edition1_Version100_November2014.pdf.