
Figure 1: DJI Zenmuse L1
The nice thing about hardware is you can pick it up, feel its heft, move it around in your hands, scare the booth folks who think you are about to drop their only sample,… Not so in our new covid age: now we experience virtual everything. Among the product buzz of the recent virtual Intergeo conference is the new DJI Zenmuse L1 lidar/camera system shown in Figure 1. The L1 features a MEMS lidar scanner from DJI subsidiary Livox, a 1” mechanical shutter RGB camera and an intriguing grayscale camera used for aiding inertial measurement. The entire package is mounted in a three-axis gimbal. The L1 is currently compatible only with the also relatively new DJI M300 RTK drone. Official pricing has not yet been released but rumor is a list price of US $18,000 (sensor only). The primary question from folks who have looked over the L1 specs has been, “What can you do with this type system?”
My company, GeoCue Group Inc., is a DJI Enterprise dealer but demo deliveries to dealers of the L1 are not slated to occur until the end of this year. Thus I can only speculate on the system at this time. I think DJI themselves are struggling a bit with the operational characteristics of the system. In a recent presentation, I saw three different numbers for network accuracy (erroneously referred to as “absolution” accuracy). Given our own experience in evaluating Livox scanners, I am thinking the numbers I saw, 10 cm network accuracy at 50 m above ground level, are probably in the ball park. We do not yet have sample data, so I cannot comment on the precision of the system (i.e. the planar hard surface deviation).
DJI have agreed to work with GeoCue to integrate the L1 into the True View EVO ecosystem as a “guest” sensor (we already support the Phantom 4 RTK in this mode). I think it may fit quite nicely at the entry level in our 3D Imaging Sensor (3DIS®) product line. Of course, that is fine, but it still does not answer the question of applications for which this sensor will be suited.
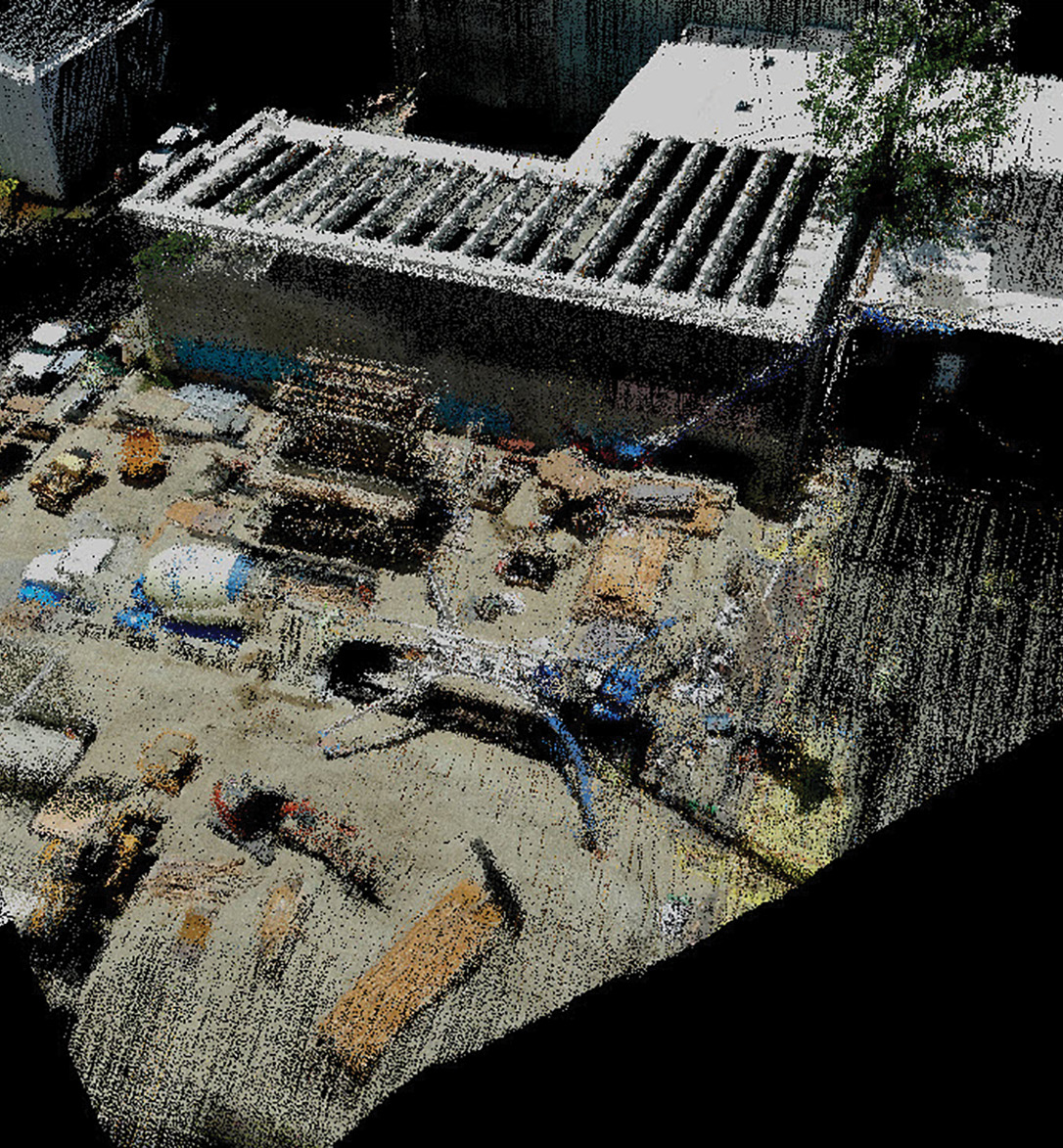
Figure 2: Construction site 3DI
For the past two years, I have been evangelizing the value of RGB colorized 3D point clouds or “3D Images” (3DI). High-accuracy 3DI are incredibly valuable in traditional lidar processing workflows for identifying features during classification. But 3DI are also an extremely useful tool for simple visualization tasks. Suppose I want to monitor a construction site on a periodic basis. I can use photogrammetry but this means I face hours of “image to point cloud” post-processing and, when this is complete, I have a point cloud that does not model a lot of construction features very well (wires, pipes, beams, etc.). 3DI from a lidar sensor with a matched camera system (and, of course, good post-processing software) is the answer. As a side note, it is important to appreciate that 3DI are not lidar points colorized from an orthophoto: these would be “2.5 DI” since an ortho can represent only a single Z color at each X, Y point. A true 3DI has to be constructed by ray-tracing each lidar point to the “best” image that sees that point.
An example of a 3D image collected using a GeoCue True View 410 system is shown in Figure 2. Not only does the colorized lidar approach provide a much more detailed scene depiction than photogrammetry, but the post-processing occurs in minutes rather than hours (it takes about 10 minutes to post-process a 15-minute flight).
Up to now, the ubiquitous use of 3DI for inspection has been hampered by the high cost of fused lidar/camera systems. We (the folks building these systems) have been so concerned about meeting a minimum threshold of network accuracy and high precision that we have not enabled systems aimed at inspection rather than higher accuracy survey. The new DJI L1 is clearly filling that gap.
I truly do believe that this sensor (and others sure to follow) will change the way we do inspection operations. Look for a host of new downstream applications that consume these data as the foundation of visualization and inspection products. Of course, we will provide a review in LIDAR Magazine as soon as we have our hands on the Zenmuse L1.