
Routescene LidarPod flying at Chernobyl Red Forest.
It’s been over three decades since reactor Number 4 at the Chernobyl Nuclear Power Plant in the Ukraine melted down, leading to the world’s worst civilian nuclear disaster in history. Now, a team of multidisciplinary researchers have used Routescene’s UAV LiDAR technology to map radioactive hotspots in greater detail than ever before.
Professor Tom Scott, from the School of Physics at the University of Bristol, UK, led a group of researchers from the UK’s National Centre for Nuclear Robotics (NCNR) to conduct surveys on multiple sites of interest within the Exclusion Zone which surrounds the damaged reactor. The surveyed sites included Buriakivka village, a settlement abandoned following contamination from the power plant accident, and the “Red Forest”, a natural woodland area located the closest to the reactor, hence the most heavily contaminated.
Working closely with local Ukrainian authorities, the team operated Unmanned Aerial Vehicles (UAVs) to perform a series of radiation mapping surveys. Routescene’s lightweight LidarPod was flown on a DJI M600 hexacopter drone over the sites of interest. The point cloud data collected was processing using Routescene’s LidarViewer Pro software to generate a detailed Digital Terrain Model (DTM) and was overlaid with the results from a gamma spectrometer survey, undertaken to measure radiation intensity, to locate the exact sites of the radiation hotspots.
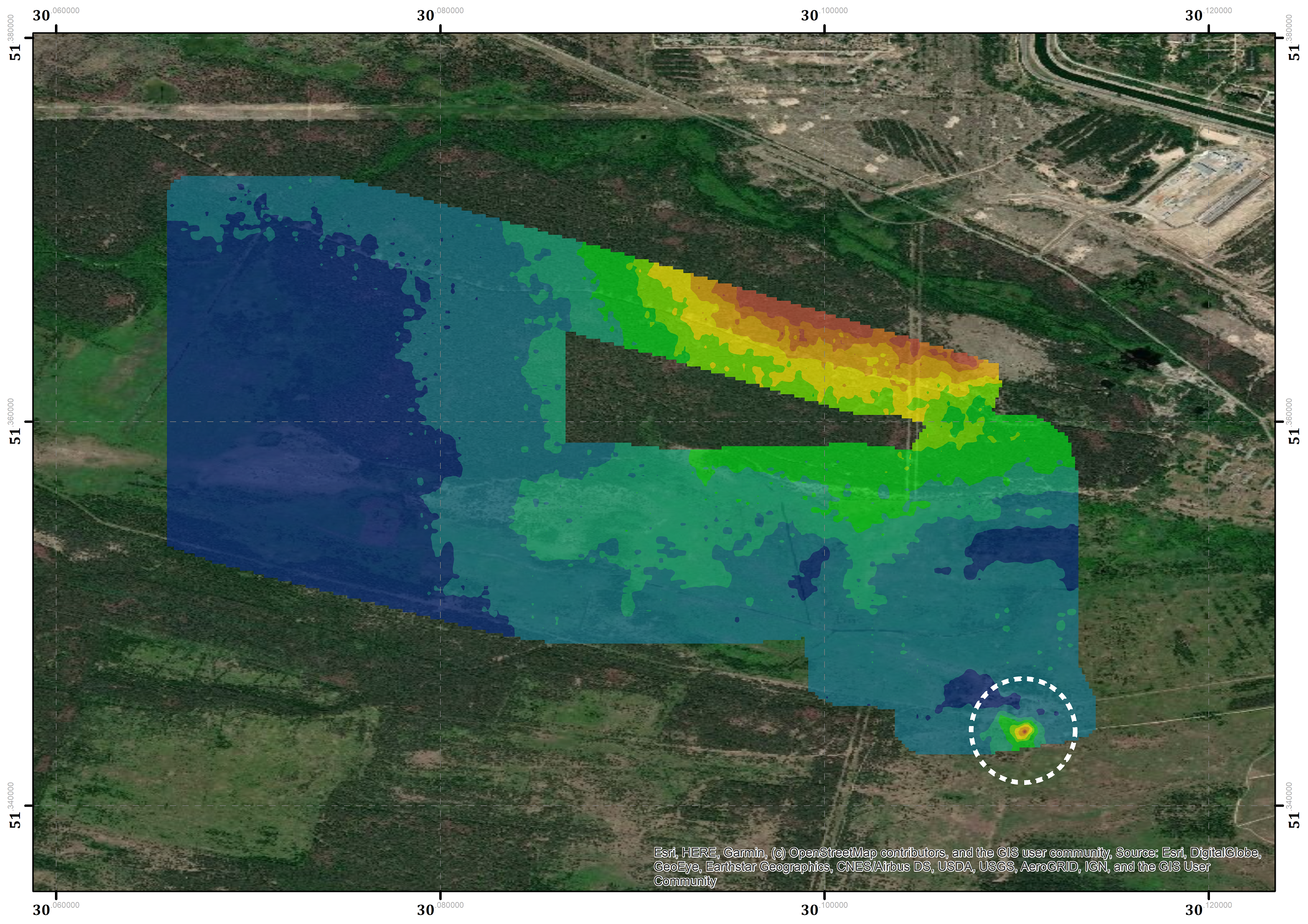
Map of radiation levels Red Forest Chernobyl. Image courtesy of University of Bristol/NCNR
Routescene’s lightweight LiDAR technology was chosen as the team “Required high-resolution terrain and building models as inputs to a hotspot identification algorithm. It was also very useful to capture the 3D shape of some buildings ,” says Dr Kieran Wood, Senior Research Associate at the University of Bristol.
“The algorithm converts the aerial radiation intensity recorded by a UAV survey into a ground intensity map. This process is heavily affected by the distance between the airborne radiation sensor and the ground/buildings,” explains Kieran, “Hence high accuracy LiDAR based models were essential”.
Routescene’s LidarPod includes a carefully selected array of sensors delivering survey-grade high resolution results. Up to 1.4 million data points per second are collected from 32 different lasers angled in a 40-degree field of view. Crucially, the Routescene solution enabled the researchers to conduct operations and complete real-time QA monitoring at a safe distance from the radioactive sites, keeping them from harm.
Planning the flight
Over ten days, the researchers deployed fixed-wing drones to fly multiple missions over the sites of interest. They coarsely mapped a grid over an area measuring about 6 square miles. Routescene’s remote-sensing LiDAR technology was then used to create a detailed 3D map of specific areas of interest.
Using the data obtained from the surveys, the researchers were able to create the most detailed map of radiation in the forest to date. The data also revealed radiation anomalies at previously unsuspected locations.
The results
While the general widespread radiation contamination in the Red Forest was already known, the results revealed that the radioactivity was unevenly disturbed. Although radiation intensity had reduced in some areas, other areas remain highly contaminated confirming continued danger to anyone accessing those areas.
The researchers detected one unexpected hotspot in the ruins of a facility that was used to separate contaminated waste during clean-up efforts immediately after the accident. Tiny fragments of spent nuclear fuel, found at an old mechanical sorting facility was emitting so much radiation that exposure for just a few hours would dose a person with as much radiation as is usually absorbed over an entire year, Professor Tom Scott told the BBC.
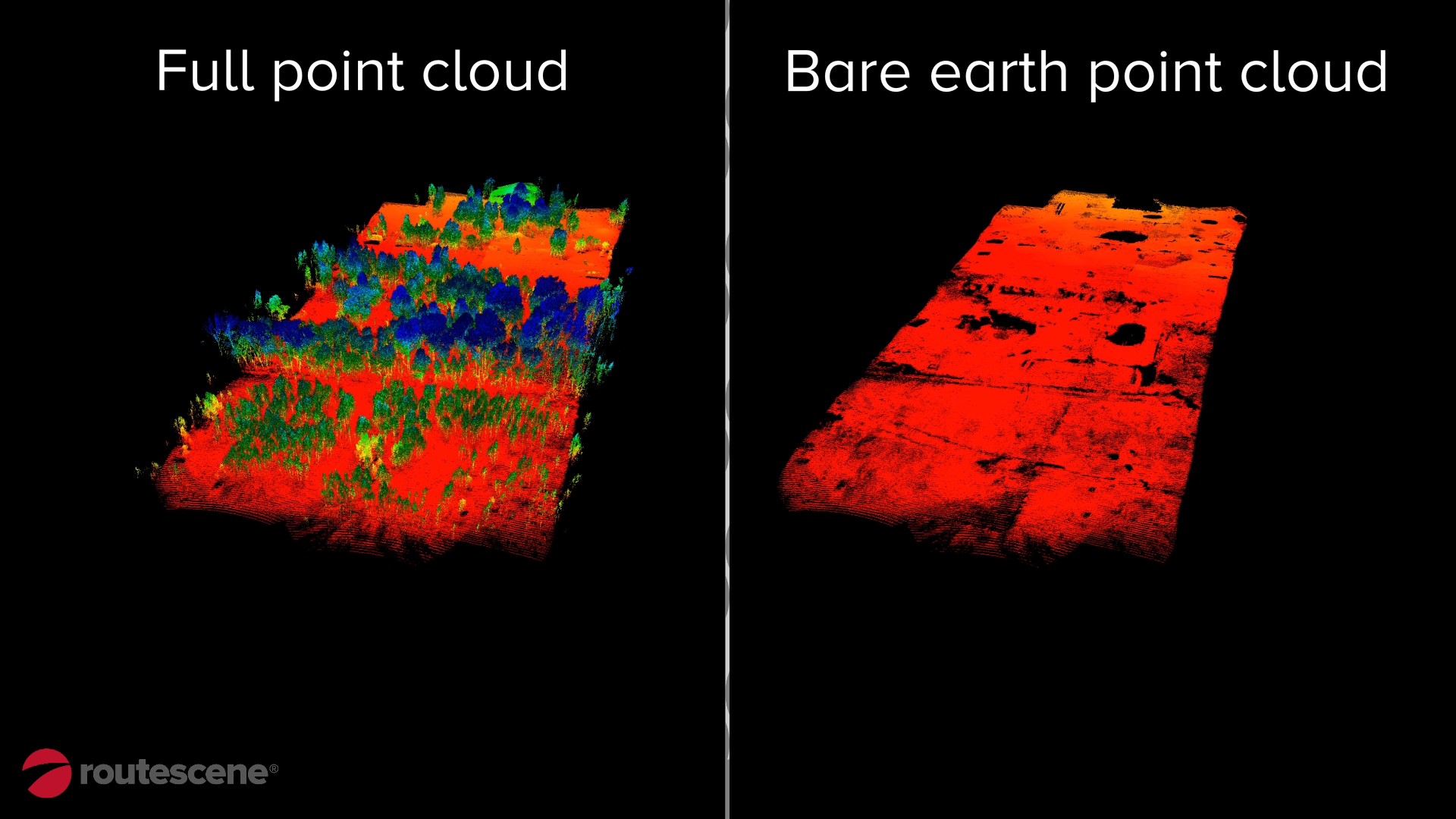
Point cloud frame export.
This recent expedition to the Red Forest was the first in a series of surveys that NCNR will conduct in Ukraine over the next year. The new maps will help officials prevent risks to visitors to the area and the full results will be published soon.
For more information about the Routescene UAV LiDAR system including the LidarViewer Pro software and new Bare Earth tool, please visit www.routescene.com
About Routescene
Routescene® is a global operation. We offer authoritative insight across all aspects of data management and have industry recognition as data visualisation experts. We understand the problems the survey industry needs to solve and have combined intelligent thinking with experience to design a reliable and practical solution to deliver fast geospatial data capture, analysis and visualisation to improve commercial decisions and performance. www.routescene.com
About the Routescene UAV LiDAR system
A market-leading 3D mapping technology designed specifically for use on Unmanned Aerial Vehicles (UAVs). A turnkey system developed to save time, improve efficiencies and productivity. It enables faster surveys, decreasing time in the field and reducing data download time, ensuring users are working with resulting datasets within hours. This systems enables safe and cost effective surveys that previously could not have taken place.
About the NCNR
The National Centre for Nuclear Robotics (NCNR) is a consortium of 8 UK Universities. Led by the University of Birmingham it is developing cutting-edge technology to solve the problem of nuclear waste. Their mission is to clear the UK of radioactive material however the human benefits of the technology they are developing go far beyond nuclear safety. Funding is via the Engineering and Physical Sciences Research Council (EPSRC), part of UK Research and Innovation (UKRI). www.ncnr.org.uk
For more information on the project please contact Dr Kieran Wood (kieran.wood@bristol.ac.uk) or Professor Tom Scott (t.b.scott@bristol.ac.uk)
