
The team preparing for UAV-lidar flights at Sand Canyon, Colorado, USA.
Since its conception, Routescene has been committed to providing a unique, end-to-end solution for all its clients. Its lightweight lidar solution, built for use on unmanned aerial vehicles (UAVs), provides technology that is transforming the surveying market.
Routescene was founded by Gert Riemersma in 2005, in Edinburgh, Scotland, to design and manufacture 3D mapping solutions. The company was an early adopter of lidar and UAV technology, and launched its UAV-lidar solution in 2013. This system comprises hardware (the LidarPod) and software (QA Monitor and LidarViewer Pro), which makes data collection and processing easier and quicker. With a growing customer base in the USA and Canada, Routescene established its North American office in Durango, Colorado in 2017.
Working with UAV-lidar is much more than adding a lidar sensor to the bottom of a drone. Fundamental to Routescene’s success is a carefully thought through six-step workflow which spans the entire utilization of the solution—from survey and project planning, data acquisition, data processing to the final outputs or ‘actionable information.’ This workflow is a set of orchestrated and repeatable procedures and processes, so every survey and subsequent data analysis is undertaken in a systematic, streamlined way, ensuring the best possible outcomes each time.
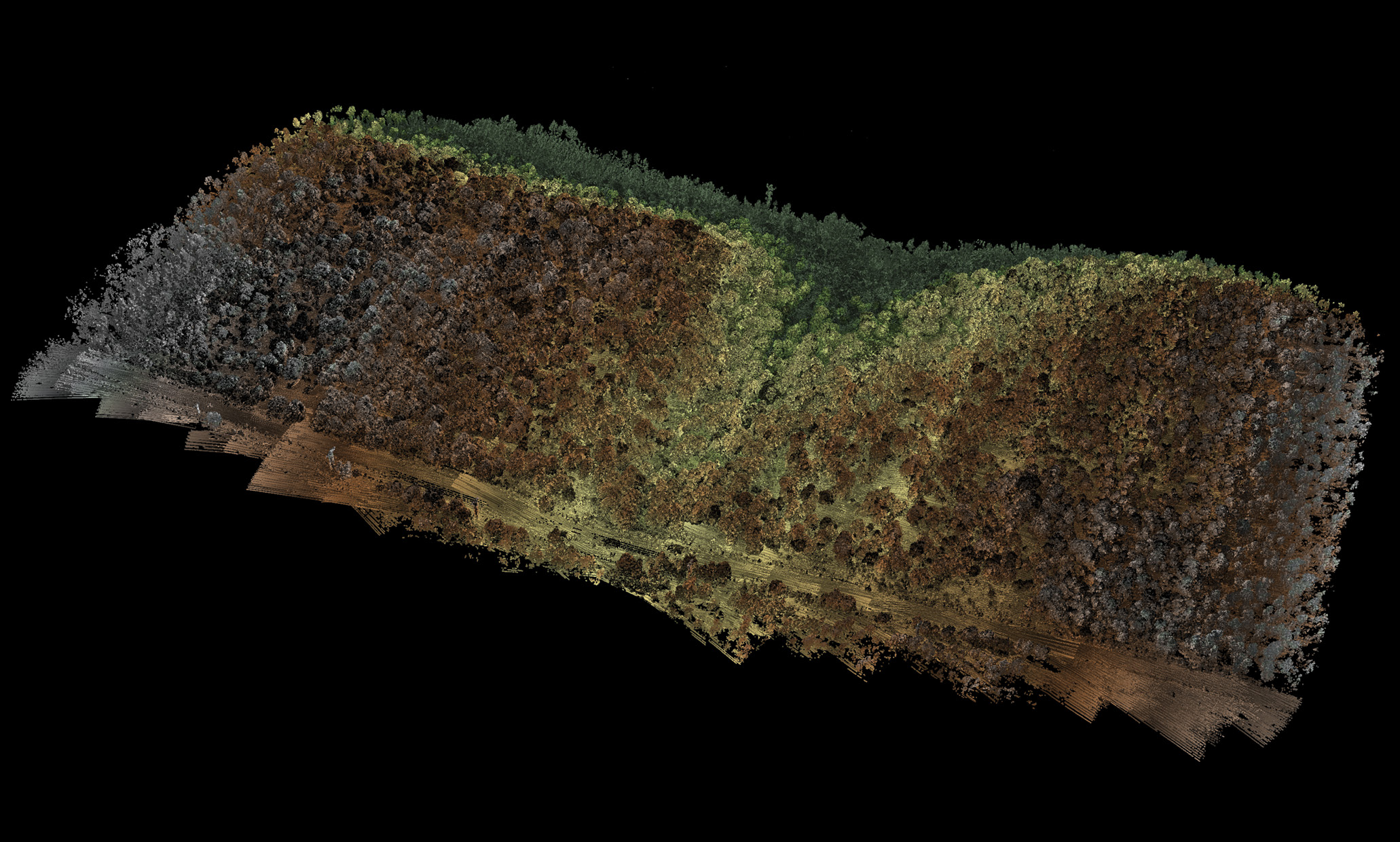
Sand Canyon—over 3.2 billion points were collected during the survey and processed.
Planning and technology
Routescene recommends that every project starts with a meticulous flight-planning process by taking into account the objectives and the terrain of the survey area. In the project described here, surveying the culturally rich Sand Canyon, Colorado, USA, the aim was to generate a high-resolution digital terrain model (DTM) devoid of trees and shrubs and to identify the location of ancient dwellings called ‘kivas’ in the undergrowth. This required a great deal of planning to accommodate the uneven terrain and a consideration of the chosen technology.
The Routescene system provided an excellent solution for Sand Canyon and many other projects. A key factor the team considers is penetrating vegetation in order to achieve the most points per square meter. This is accomplished by the integrated Velodyne HDL-32E in the Routescene LidarPod. The Velodyne HDL-32E is a premium lidar scanner with a proven record of robustness, high accuracy and high resolution. Its superior-quality laser diodes are at least twice as accurate as those in the Velodyne Puck (VLP-16). The latter is designed for mass production and low cost, and thus uses lower-quality laser diodes, perfect for object detection where accuracy is not the main consideration.
The HDL-32E’s high update rate of up to 1.4 million points per second creates a high-resolution point cloud to enable detailed analysis of the final terrain model. Overall, with the HDL-32E we achieve a final output resolution of an impressive 400 points/m2. The HDL-32E has been used in hostile and rough environments over its lifetime and is well designed and built. This is important given the typical location of a mapping project, in a remote place where equipment failure is costly and would cause significant delays. The HDL-32E has a maximum range of 110 m. This is benchmarked at 10% reflectivity on a white surface. Given that natural features have a lower reflectivity, the “usable” range is around 80 m. This “usable” range is determined by experience and analyzing the results of previous surveys. The Puck (VLP-16) also has a maximum range of 110 m, but the “usable” range is around 60 m. This has an impact on the flying altitude of the UAV and the swathe of the collected data. With a HDL-32E the UAV can fly higher and collect a broader swathe.
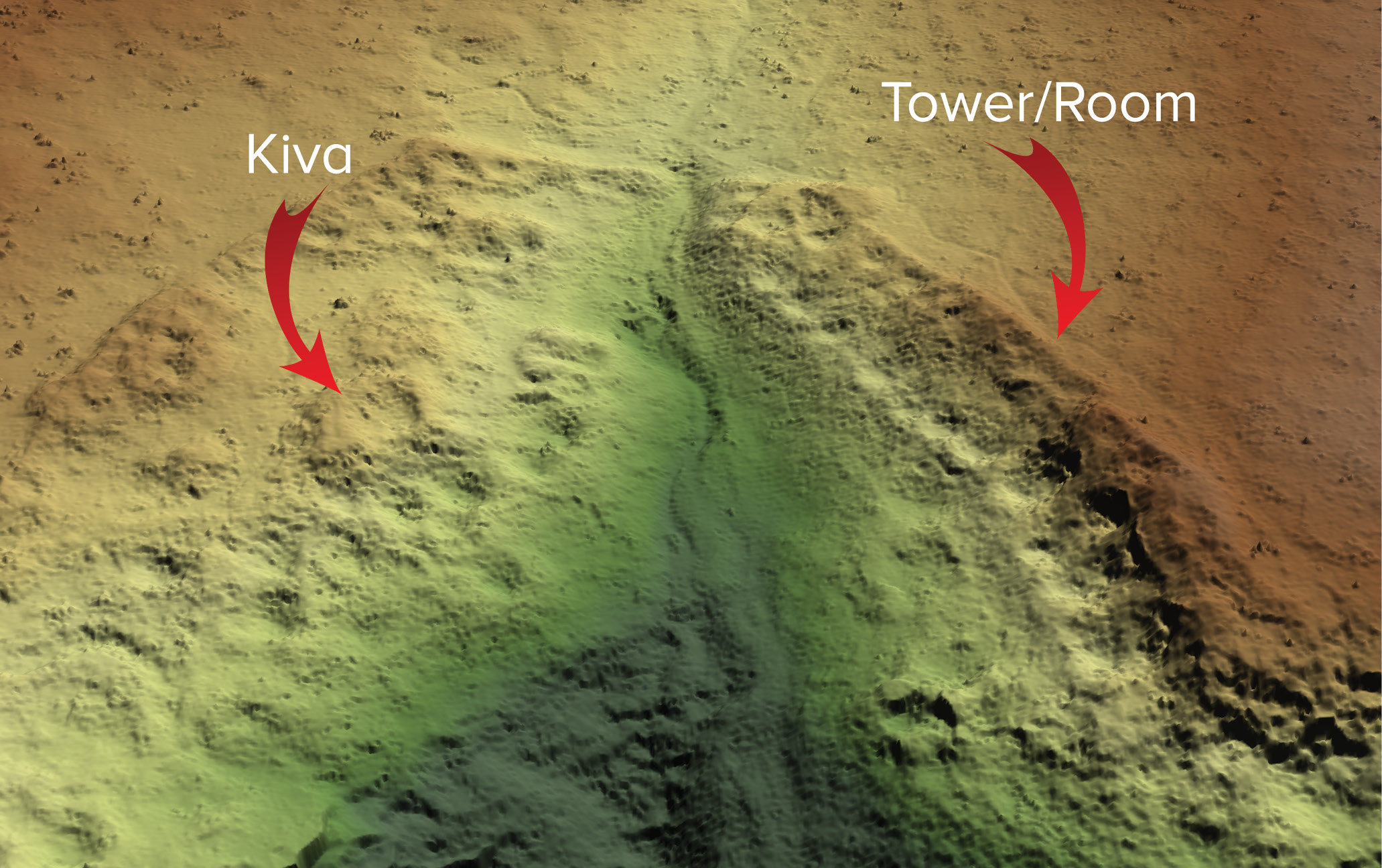
Completed DTM showing 700-year old dwellings called ‘kivas’.
Processing the data
In surveying, we know that creating a bare-earth model or DTM is one of the most critical steps in lidar data processing on which subsequent analysis is based. For example, all classification processes start with establishing bare earth. Typically the main aim is to achieve as high a resolution DTM as possible, devoid of trees and shrubs. The secondary objective usually is to ensure a high degree of accuracy, often relative accuracy to enable comparison with other datasets. Designed for use on UAVs, Routescene’s LidarPod includes a carefully selected array of sensors to ensure that the solution is fit for purpose across a range of different surveying and mapping applications.
The team aims to simplify and reduce the time customers spend post-processing lidar data. Achieving bare-earth modelling and the final results quickly and efficiently is the ultimate goal. After every mission, the data is downloaded from the LidarPod and inspected using Routescene’s proprietary LidarViewer Pro software. This software provides a framework on which to build a lidar processing workflow, using the Filter Development Toolkit to create and apply specific filters to the collected point cloud, to achieve the most accurate final deliverable as quickly as possible.
Quality assurance
Routescene has a strong ethos of quality assurance and quality control (QA/QC), with foundations in land survey training enhanced by the author’s many years working in the offshore industry, where QA/QC is of paramount importance. As part of the standard QA process, Routescene advocates that every survey has ground control, established by accurately surveying ground control points (GCPs) and placing Routescene lidar targets on them.
In the Sand Canyon survey, a discrepancy was identified in the positions of the control points relative to the processed point clouds. In case additional data needs to be collected at a later date, be it unplanned or planned, as standard practice Routescene permanently marks each GCP using a peg driven into the ground. This best practice allowed the survey team to revisit the site to resolve the discrepancy. It was mid-winter by now, however, and the GCPs were located under a foot of snow and resurveyed. After extensive analysis, it was revealed that the use of Microsoft Excel to store the GCP coordinates was detrimental. Excel rounds all numbers to six decimal places and, as it was storing geographical coordinates, this caused the team to lose up to 4 m of accuracy. Reloading the original raw data into another format restored the accuracy, but left the ground survey team members rather displeased—a lesson learned!
The Routescene method
Overall the Routescene solution is founded on the principles of quality surveying. For every client, the team takes a unique and tailored approach. In the historic Sand Canyon, this method paid dividends. Although the site was studied, mapped and excavated between 1984 and 1995 using traditional survey techniques, the Crow Canyon Archaeological Center was excited to discover previously undocumented structures. The lidar image proved to be the best tool for visualizing the ancient site in detail and to plan future preservation. Removing the need for meticulous ground surveys, the impressive data accelerated understanding of the Pueblo area and has allowed the client to concentrate its future work on the newly found structures.
With every client and project, Routescene’s approach is unique. From uncovering the secrets of historic sites to helping to create preservation plans, it is not only the technology but the people behind it that satisfies clients. With lidar technology and years of experience, Routescene continues to thrive no matter the challenge. 
Gert Riemersma, CTO of Routescene, has 20 years’ experience as a hydrographic surveyor and has been a private pilot since 1986. He has worked with lidar since 2008 and UAV-lidar since 2013. For more information please visit www.routescene.com.